|
Ŀ ¼
1 ����………………………………………………………………………………1
1.1 ǰ��………………………………………………………………………1
1.2 ��ҵ��е���������е�Ӧ��……………………………………………3
1.3 ��е�ֵ����………………………………………………………………4
1.3.1ִ�л���……………………………………………………………4
1.3.2��������……………………………………………………………5
1.3.3����ϵͳ����………………………………………………………5
2 ���岼����Ʒ���…………………………………………………………………5
2.1 ��е�ֵ�ȷ��………………………………………………………………5
2.2����������ѡ��……………………………………………………6
2.3 ��е�ֵļ��������б�…………………………………………………7
3 ��е���ֲ�����Ƽ���……………………………………………………………7
3.1 �ֲ����ʱӦע�������…………………………………………………7
3.2 ���͵��ֲ��ṹ……………………………………………………………7
3.3 ��е���ֲ��ṹ����������Ƽ���………………………………………8
3.3.1ѡ���ֲ������ͼ��н�װ��………………………………………8
3.3.2��ָ�н�����Һѹ���������ļ���Һѹ��ѡ��………………8
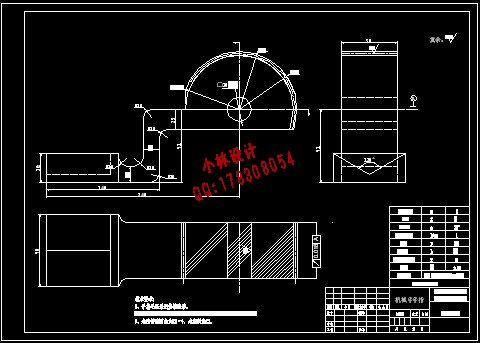
3.4 ��е����ָ������Ƽ���………………………………………………10
3.4.1���ֳ���������������Ƽ���…………………………………10
3.4.2��ָָ������Ƽ���……………………………………………14
3.4.3��ָָ�����ְ�װ������Ƽ���………………………………14
4 ��е������Ƽ���…………………………………………………………14
4.1 ��е���ṹ���˶�����……………………………………………14
4.2 ��е��������װ�õ���Ƽ��㼰ѡ��………………………………14
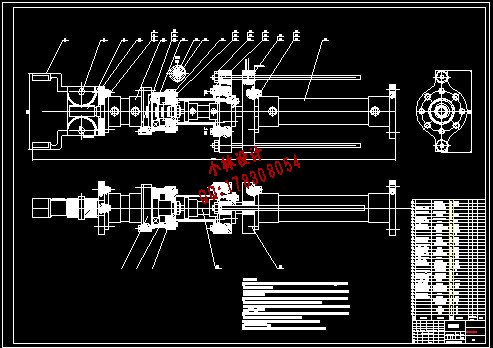
5 ��е�ֱ۲�����Ƽ��йؼ���…………………………………………………16
5.1 �۲����ʱӦע�������………………………………………………16
5.2 �ֱ۵ĵ��ͽṹ�Լ��ṹ��ѡ��………………………………………16
5.3 �ֱ�Z���������˶������������������……………………………17
5.4�ֱ�Z���������˶�Һѹ�ṹ�ߴ����Ƽ��㼰ѡ��……………19
6 ���������…………………………………………………………………20
6.1 �����ĸ���……………………………………………………………20
6.2 �������ʱӦע�������……………………………………………21
7 ҺѹԪ���������������ѡ��………………………………………………21
7.1 Һѹ�õ�ѡ��……………………………………………………………22
7.2������ѡ��……………………………………………………………22
7.3 �ܵ����………………………………………………………………22
7.4 ��������………………………………………………………………22
7.5 ҺѹԪ����ѡ��…………………………………………………………22
7.6 Һѹ�͵�ѡ��…………………………………………………………24
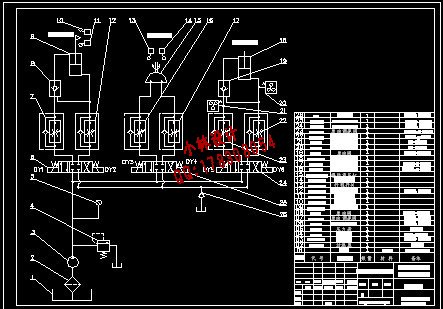
8 Һѹϵͳ������………………………………………………………………25
8.1 ѹ����ʧ������…………………………………………………………25
8.1.1��·ѹ����ʧ������……………………………………………25
8.1.2�ֲ�ѹ����ʧ����……………………………………………26
8.2 ����Һѹϵͳ�ķ�������………………………………………………26
9 Һѹϵͳ�������̼���………………………………………………………27
������…………………………………………………………………………28
�ο����� ……………………………………………………………………………28
��л …………………………………………………………………………………29
���� …………………………………………………………………………………30
Һѹ���Ƶķ�ת��е�ֵ����
ժҪ�����������������Ҹ߶����ӻ����˼������о���������;�Ļ�����Խ��Խ������ڿ�ѧ�о����ִ�����ҵ������ҵ��ҵ���С���е���ǻ����˵IJ��������ǻ�������ɸ��������ִ�л�����������Ҫ����������ϵ��Զ��������һ�������ɶȵ�ר�÷�ת��е�֣���ʵ�ֹ������Զ����������˹����Ͷ�ǿ�ȣ�������Ͷ������ʡ��û�е�ֲ���Һѹ������ʵ���˼н�����ֱ�ƶ���չ���ȶ�����Ϊ��ʵ����Щ�����������˲�������Էֱ�ʵ�ֶ���Ҫ��
�ؼ��ʣ�Һѹ��������ת����е��
The Design Of Turning Manipulator Based On Hydrautic Control
Student:Yu Jie
Tutor:Zhou Guangyong
(Oriental Science ��Technology College of Hunan Agricultural University, Changsha 410128)
Abstract: In today's world, many developed countries have been attaching great importance to the study of robotics, meanwhile, more and more robots of various uses have been used in scientific study, modernized industrial production and industrial operations. Robot manipulator is the operator who directs the robot in completing various tasks. This paper, according to the automation of production lines, it aim to develop the design of a dedicated flip with two degrees of freedom manipulator to achieve the goals of factory automation, reducing the labor intensity of workers and improved labor productivity. The use of hydraulic-driven robot has done successfully in clamping, such as vertical movement and action to start. In order to achieve these movements, the author adapts the design of the components to achieve the action requested.
Key words: hydraulic drive; flip; Manipulator
1 ����
1.1 ǰ��
�ڵ�����ģ����ҵ�У���ҵΪ�������Ч�ʣ����ϲ�Ʒ�������ձ������������̵��Զ����̶ȣ���ҵ��������Ϊ�Զ����������ϵ���Ҫ��Ա������ҵ����ͬ�����á���ҵ�����˵ļ���ˮƽ��Ӧ�ó̶���һ���̶��Ϸ�ӳ��һ�����ҹ�ҵ�Զ�����ˮƽ��Ŀǰ����ҵ��������Ҫ�е��ź��ӡ���Ϳ�������Լ��Ѷ���ظ��Բ����Ͷ�ǿ�ȼ���Ĺ�����������ʽһ���ȡʾ�����ֵķ�ʽ��
20����50����Ժ�o��е�����ƹ㵽��ҵ�������ũo�����ڸ��©p��Ⱦ���صĵط�ȡ�Ź�����װж���ϩoҲ��Ϊ�����ĸ���װ�����Զ������p�Զ������ߺͼӹ�������Ӧ�éo��������ϻ�ӵ�����ȡ�ŵ��߲����̶�����������ߵ�������е����Ҫ���ֲ��������˶�������ɡ��ֲ�������ʹ�ó��Ϻ����������ͬ�o�������мг֩p�гֺ����������͡��˶�����һ����Һѹ�p�����p����װ����������е�ֿɶ�����ʵ�������p��ת���������˶��oһ����2��3�����ɶȡ���е�ֹ㷺���ڻ�е����pұ��p�Ṥ��ԭ���ܵȲ��š���ģ�����ֺͱ۵�ijЩ�������ܣ������̶�����ץȡ�����˶���������ߵ��Զ���װ�á����ɴ����˵ķ����Ͷ���ʵ�������Ļ�е�����Զ����������к����������Ա���������ȫ������㷺Ӧ���ڻ�е���졢ұ�𡢵��ӡ��Ṥ��ԭ���ܵȲ��š�
�����һ���⣬���Ľ����һ̨�����ɶȵĹ�ҵ�����ˣ���������������������ȣ����Ľ���ƻ����˵������ۡ�����������Һѹ�ͻ�е�ֵĽṹ��Ȼ��ѡ����ʵĴ�����ʽ��������ʽ��������˵Ľṹƽ̨���ڴ˻����ϣ����Ļ�����Ƹû����˵�Һѹ����ϵͳ�������˹����ǽ���ʮ������Ѹ�ٷ�չ�������ۺ�ѧ�ơ��������˻�е���̡����ӹ��̡���������̡��Զ������ƹ����Լ��˹����ܵȶ���ѧ�Ƶ������о��ɹ����ǵ�����ѧ������չ���Ծ������֮һ��Ҳ���ҹ��߿Ƽ����ٹ��ʷ�չ����Ҫ���档��ҵ�����˵��о��������Ӧ��ˮƽ����һ�����ҿƼ���չ�;���ʵ�������������ܵ�������ҵĹ㷺���ӡ�
Ŀǰ�������˵Ķ��壬�����λ��δͳһ������Ҳ������ͬ��������Ϲ���֯������֯����������������Э�����ҵ�������µĶ��壺��ҵ��������һ�ֿ��ظ���̵Ķ�ܲ���װ�ã�����ͨ���ı䶯����������ɸ��ֹ�������ҪӦ���ڰ��˲��ϣ����ݹ������ο�����Ķ��壬�ۺ��ҹ���ϰ������Թ�ҵ�����������¶��壺��ҵ��������һ�ֻ���������������ɶȽ϶࣬�����������������ⶨλ���Զ����̶ȸߵ��Զ�������е����Ҫ���ڼӹ��Զ��ߺ���������ϵͳ�д��ݺ�װж������оߡ�
|