 |
|


|
设计名称 |
液压控制的移置机械手的设计 |
 |
|
设计编号 |
A82-A0124 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
16000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括: 主要内容和要求(宋体五号,行间距单倍行距)
1. 结合毕业实习进行方案的选择,要求论证充分。 毕业论文(设计)的主要技术参数或试验方案:
1.工件尺寸:不超过300*300*300
摘要 …………………………………………………………………………………………1
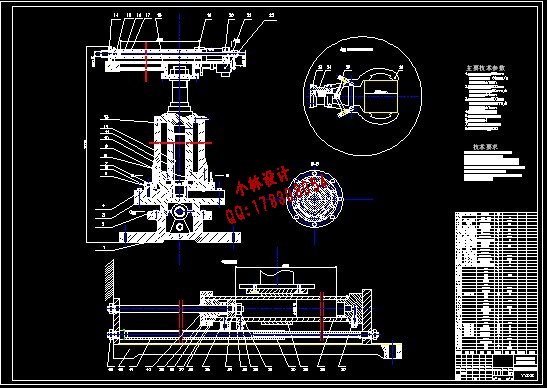
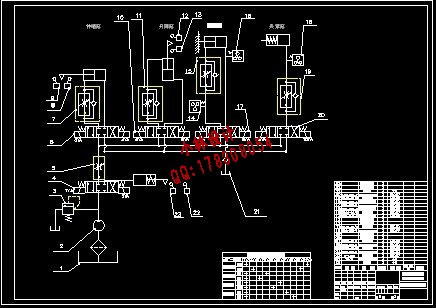
摘 要:本次设计的液压传动机械手根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,并绘制必要装配图、液压系统图。机械手的机械结构采用油缸、螺杆、导向筒等机械器件组成;在液压传动机构中,机械手的夹紧、伸缩、升降、横移均采用伸缩油缸。文章主要叙述了机械手的设计计算过程,全面详尽的讨论了搬运机械手的手部、手臂以及机身等主要部件的结构设计。 The Design Of Displacement Manipulator Based On Hydrolytic Control
Abstract: The design of hydraulic driving manipulator according to the order of moves, use the basic theory, basic knowledge and related mechanical design expertise comprehensively to complete the design of manipulator, and drawing the necessary assembly, hydraulic system map. Manipulator mechanical structure using tanks, screw, guide tubes and other mechanical device component; In the hydraulic drive bodies, manipulator arm clamping, telescopic, lifting and traverse using telescopic tank. The paper mainly narrated the design and calculation of light and transfer manipulator, The comprehensive exhaustive discussion has transported manipulator's hand, the arm, the fuselage and so on ,which the major structural design computation. |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
