 |
|


|
设计名称 |
山茶采摘平台设计研究[农业机械] |
 |
|
设计编号 |
B140 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
17000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.09.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括: CAD版本图纸,共6张
主要内容和要求(宋体五号,行间距单倍行距)
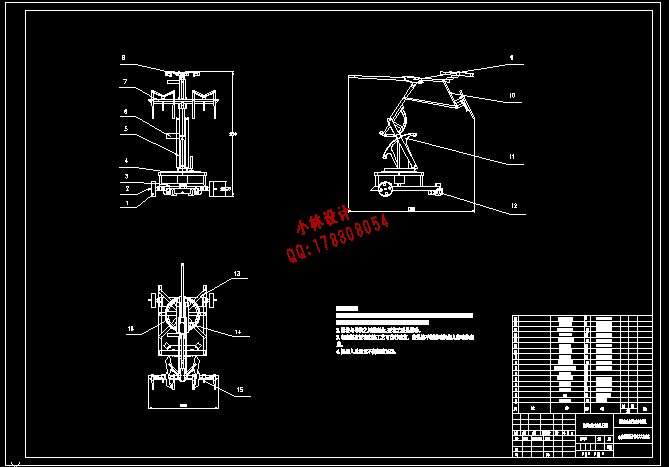
设计要求: 山茶采摘平台设计研究
摘 要:随着国内外采摘机器人的兴起,21世纪是农业机械化向智能化方向发展的重要历史时期,机械作业已逐步进入农业生产领域。本文研究设计了能减轻人工劳动强度和提高工作效率的山茶采摘平台,平台由主控模块、行走模块(全向履带)和升降模块组成。系统以STM32为核心控制器,通过对伺服电机的控制可实现采摘平台的行走控制和升降控制。本文结合由铝型材制作的采摘平台的实物模型对系统的设计进行了分析和总结。 Design and research of the camellia picking platform
Abstract: With the rise of the picking robot at home and abroad, the 21st century is an important historical period of the mechanization of agriculture to the intelligent direction, the robot has gradually entered the field of agricultural production. This study design can reduce labor intensity and improve the efficiency of the camellia picking platform, This picking platform by walking module(Omni-track), lifting module and main control module. The system use the STM32 as the core controller. The control of servomotor can be achieved walking and lifting of the picking platform. The design of the physical model produced by the aluminum picking platform system was analyzed and summarized in this paper.
目录
5 主控制板程序设计 21 |
|
部分图纸 截图 |
      |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
