|
设计简介 |
设计描述:
文档包括:
说明书一份,62页,约21000字
CAD版本图纸,共4张
摘 要
气动机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。本设计机械手主要用于物料的运输。
机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,本设计介绍的是机械手模型基于PLC的控制系统设计。气动机械手控制系统的设计要求是在控制系统的指令下,能将工件迅速、灵活、准确、可靠地抓起并运送到指定位置,因此本设计采用PLC可编程控制器作为工件抓取机械手的控制系统,首先根据机械手的动作流程和输入输出要求选择了PLC的型号,然后根据机械手功能和特性对各原件进行了选型并对其进行了计算与校和,之后对机械手手爪进行了设计并对其进行计算与校和,在此基础上对电气回路进行了设计,最后对控制系统硬件及编辑原件进行了选择,同时确定I/O接口,进行程序的编辑与调试,从而使机械手完成最后的装夹任务。
关键字: 可编程控制器PLC;机械手;步进电机;控制设计;I/O接口;电气回路
Abstract
Pneumatic manipulator is a automated devices that can mimic the human hand and arm movements to do something,aslo can according to a fixed procedure to moving objects or control tools. It can replace the heavy labor in order to achieve the production mechanization and automation, and can work in dangerous working environments to protect the personal safety, Therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.
Manipulator is an automatic position control and programming the machine to change again, this design is a model of manipulator based on PLC control system design. Pneumatic manipulator control system of design requirements is in control system of instruction Xia, can will workpiece quickly, and flexible, and accurate, and reliable to grabbed and delivery to specified location, so this design used PLC can programming controller as workpiece crawl manipulator of control system, first under manipulator of action process and entered output requirements select has PLC of model, and under manipulator function and characteristics on all original for has selection and on its for has calculation and school and, After the robot gripper is a design and calculation and school and, on the basis of the electrical circuit has been designed, last on the control system hardware and select the Edit original to determine I/O interface, editing and debugging of programs, so that the robot to complete the final setup tasks.
Key words: PLC programmable controller ;Manipulator ;Stepping motor ;
Control design ;I/O interface ;Electrical circuit
目 录
摘要……………………………………………………………..……….……....Ⅰ
Abstract……………………………………………………………………...…Ⅱ
第1章 绪论…………………………………………………………..….….1
1.1 课题背景…………………………………………………………...…..1
1.2 机械手的定义与分类……………………………………………...…..2
1.3 机械手应用及组成结构…………………………………………...…..2
1.4 机械手的发展趋势…………………………………………….…..…..3
1.5 总体设计要求………………………………………………….…..…..4
1.6 基本内容和拟解决的问题……………………………………….….…5
第2章 PLC的介绍与选择…………………………………….…..……6
2.1 PLC的特点………………………………………………….….…..…..6
2.2 PLC的选型……………………………………………………..…..…..7
2.3 三菱FX系列的结构功能………………………………….……...…..8
2.4 本章小结……………………………………………………….....……9
第3章 各功能实现形式与控制方式…………………………..…..…11
3.1 机械手模型的机能和特性……………………………………..…..…11
3.2 夹紧机构…………………………………………………………....…11
3.3 躯干……………………………………………………………..…......11
3.4 直流电机的选择…………………………………………………....…12
3.5 步进电机…………………………………………………………....…12
3.6 步进电机驱动器……………………………………………….......….14
3.7 传感器……………………………………………………………......16
3.8 直流电机驱动单元……………………………………………..…....18
3.9 旋转编码盘………………………………………………………..…18
3.10本章小结………………………………………………………..…...20
第4章 机械手手爪的设计……………………………………..…..….21
4.1 手爪的种类及设计注意事项……………………………………..…21
4.2 手指的抓取机能及手指尺寸计算………………………………..…22
4.3 夹紧气缸的选用…………………………………………………..…25
4.4 手爪驱动力的计算…………………………………………………..26
4.5 气压传动的设计要求……………………………………………..….30
4.6 气压传动系统组成………………………………………………..….30
4.7 气路设计………………………………………………………….…..30
4.8 本章小结…………………………………………………………..….31
第5章 控制系统设计………………………………………………...…32
5.1 控制系统硬件设计………………………………………………..…32
5.2 PLC梯形图中的编辑元件…………………………………….….…32
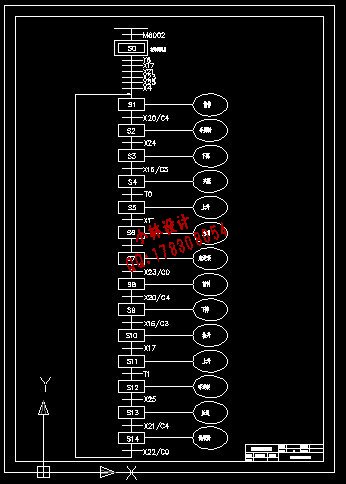
5.3 PLC的I/O分配………………………………………………..….…33
5.4 机械手控制系统的外部接线图……………………………….….....33
5.5 控制系统软件设计…………………………………………….….....34
5.6 公用程序……………………………………………………….….....35
5.7自动操作程序……………………………………………………...…36
5.8 手动单步操作程序……………………………………………...…...36
5.9 回原位程序……………………………………………………...…...36
5.10本章小结……………………………………………………….........47
结论……………………………………………………………………..……..48
参考文献………………………………………………………………..........49
致谢………………………………………………………………………..….51
附录…….……………………………………………………………………..52
|