 |
|


|
设计名称 |
双回转数控工作台的设计 |
 |
|
设计编号 |
C137 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
36000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.09.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
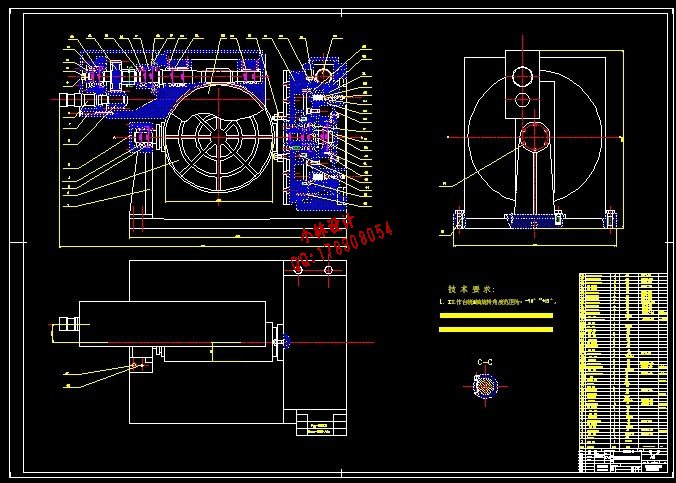
设计描述:
文档包括: CAD版本图纸,共6张:
0控制电路.dwg ……………… 毕业设计题目:双回转数控工作台的设计 毕业设计专题题目:双回转数控工作台的设计
毕业设计主要内容和要求:
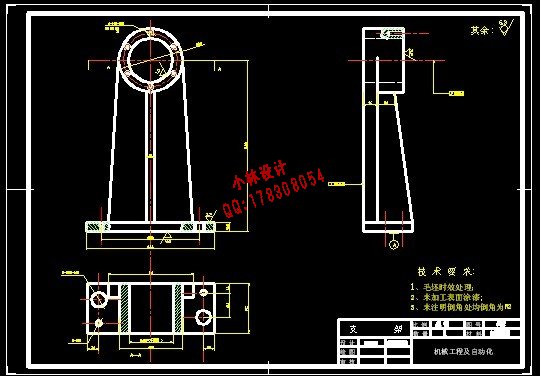
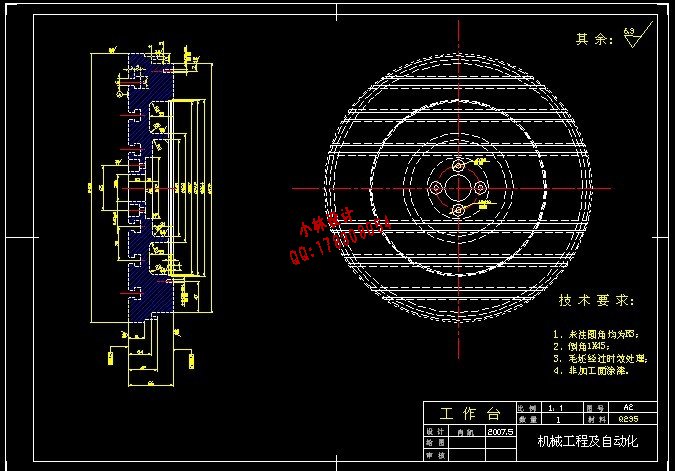
在现有的三坐标联动数控机床的工作台上再增加一个具有两个旋转自由度的数控回转工作台,将其安装在原有的工作台上,与原有的工作台成为一个整体,成为一个多自由度的回转工作台,即双回转数控工作台。再通过对数控系统的升级(不属于此题范畴),使该机床成为五坐标联动的数控机床。这样的双回转数控工作台不仅可以沿X、Y、Z方向作平行移动,在A、B两轴能同时运动,且能随时停止,在A轴上能够在一定角度内连续旋转,在B轴上可以做360度的连续旋转。不仅可以加工简单的直线、斜线、圆弧,还可适应更复杂的曲面和球形零件的加工。 关键词:数控,回转工作台,五坐标联动,双回转,机床
ABSTRACT At current three sit the mark connect the number that move the work on the stage controls the machine bed increases a number for having two revolve free degree controls the turn-over work set, will its gearing is in the original work on the stage, with originally possessed of the work set becomes a the whole, becoming the turn-over work set of a many free degrees, namely the double turns round the number controls the work set. Pass again the grade creep( do not belong to this category) that logarithms control system, make the machine's bed become five sit the mark connect the dynamic number controls the machine bed. Such a turn-over number controls the work set can not only make the parallel ambulation along the X, Y, the direction of Z, continuing to revolve in A, B two stalks can at the same time exercise, and can at any time stop, on the A stalk can in the certain angle, canning the 360 degrees of revolving continuously on the B stalk. Can not only process the simple straight line, oblique line, arc, can but also adapt to the more complicated curved face to processes with the spheroid spare parts. Key words:The numeric controls, Turning round the work set, Five sit the mark; Connect to move, The double turns round, Machine bed
第1章 绪 论 1 |
|
部分图纸 截图 |
     |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
