 |
|


|
设计名称 |
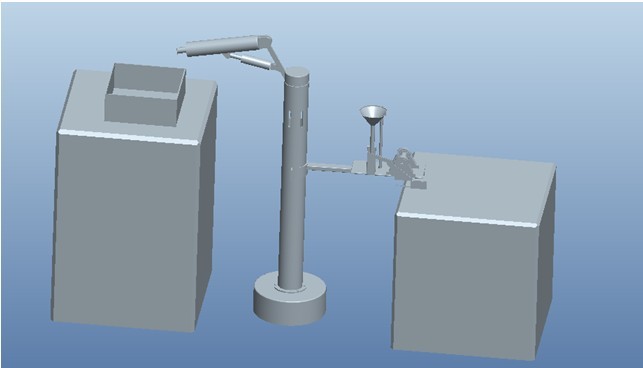
双臂式自动送料机器人结构设计[PROE三维] |
 |
|
设计编号 |
Y093 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
16000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
Word说明书1份,共35页,约16000字 双臂式自动送料机器人结构设计
铆接技术作为金属结构零件相互连接的方法,适用于铆钉连接、零件翻边、永久连接等,在五金工具、飞机制造维修、精密机械、汽车制造等行中应用广泛。本课题通过了解压铆机的工作原理及主要功能,分析目前常用送铆方式,提出双臂自动送铆机器人的自动送铆方案。中一臂主要为物料的抓取功能;另一臂主要完成送料功能。 关键词:铆接;自动送料;机器人
Key words:Rivet;Automatic Feed;Robots
目 录 |
|
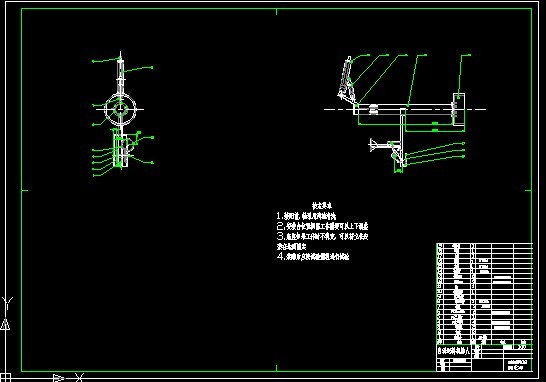
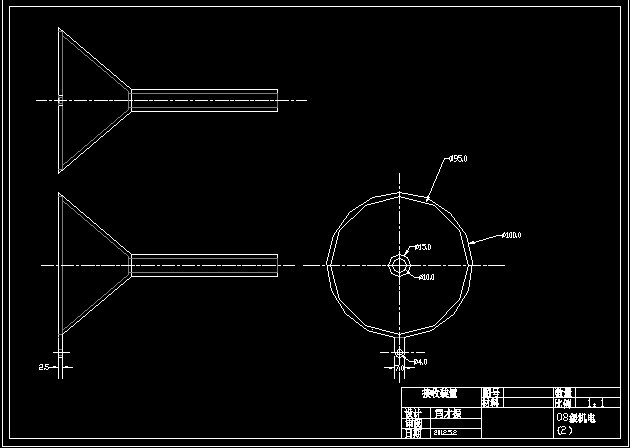
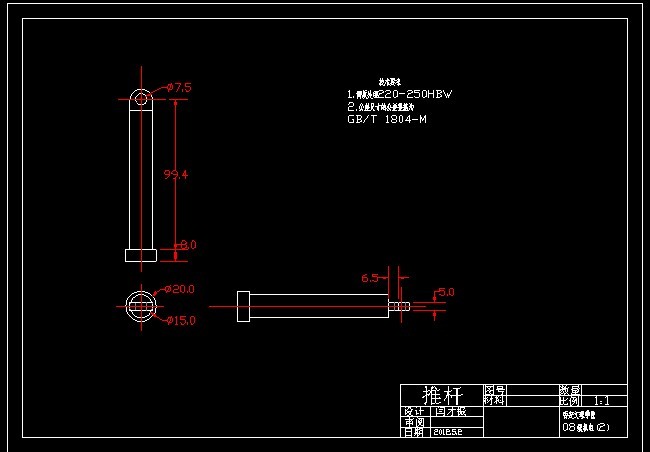
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
