 |
|


|
设计名称 |
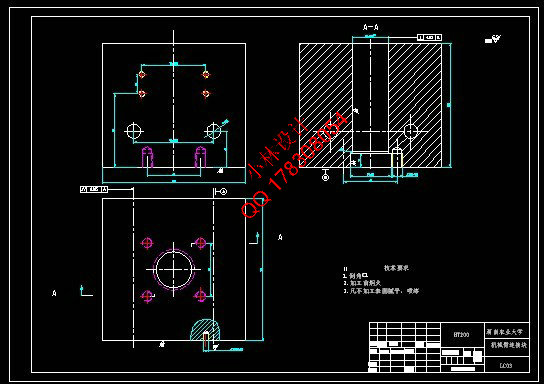
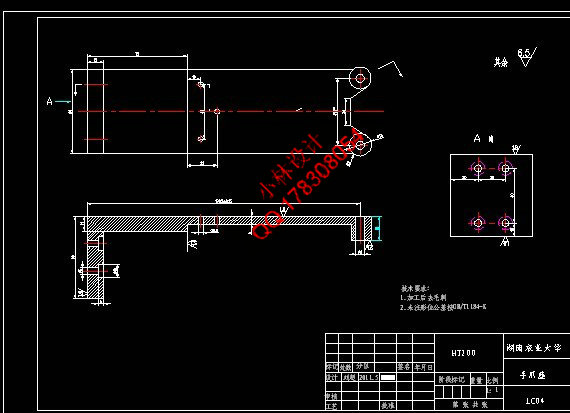
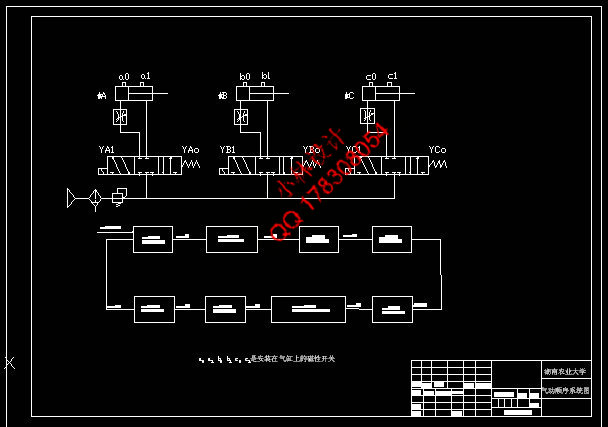
注塑机取件机械手的设计【三自由度】 |
 |
|
设计编号 |
Y195 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
12000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括: CAD版本图纸,共15张 目 录
注塑机取件机械手的设计
Design of Manipulator for Injection
Abstract : In order to enhance the efficiency of production and guarantee the quality of products,more attention has been paid to the automation in the process of production in the modern manufacturing industry with large scale.Therefore,industrial robots are gradually appproved and adopted by enterprises as an important part in the automation production line.To some extent,the technical level and application of industrial robots have reflected on the automation level in national industries.At present,they mainly undertake such jobs mostly in playback way as welding,spraying,transporting taking and stowing,which are usually done repeatedly with high work strength. |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
