|
设计描述:
文档包括:
word说明书一份,共54页,约17000字
CAD版本图纸,共22张
摘 要
水稻钵苗移栽是一种利用钵盘育秧的水稻移栽技术,是水稻种植过程中的重要环节。水稻的钵盘育秧充分保留了秧苗生长的营养土质,植伤轻、返苗快,使作物提早成熟,且增产增收;移栽充分利用了光热资源,对水稻秧苗有气候的补偿作用,同时有使作物生育提早的综合效益,因此水稻的钵苗移栽可以产生非常可观的经济效益和社会效益。但与其他国家和地区相比,我国水稻种植机械化程度较低,与国内水稻生产的其它环节相比,机械化程度也是最低的。因此研究一种新的水稻钵苗移载机构,对水稻的机械化种植与高产高收具有非常重要的意义。
本文通过对国内外的水稻钵苗移栽机构进行对比分析,提出了一种高效率的水稻钵苗移栽机构为旋转式水稻钵苗移栽机构。该水稻钵苗移栽机构由驱动部分与移栽臂两部分构成,其中驱动部分由非匀速间歇传动机构与非匀速传动机构串联组成,移栽臂用于完成机构的取秧、推秧。
本文的研究内容如下:
1.根据水稻钵苗移栽的农艺特性与工作轨迹的要求,确定了以椭圆-不完全非圆齿轮行星轮系为传动机构的设计方案,该旋转式传动机构平稳性好、效率高。
2.分析了该水稻钵苗移栽机构的工作原理,并对机构进行运动学建模与传动特性分析。
3通过水稻钵苗移栽机构的辅助分析与优化软件,对该机构进行参数优化,最后得到一组较优的结构参数:a=23.069mm,k=0.994,α=291°,λ=6°,δ=29°,φ0=-39°,S=152mm.
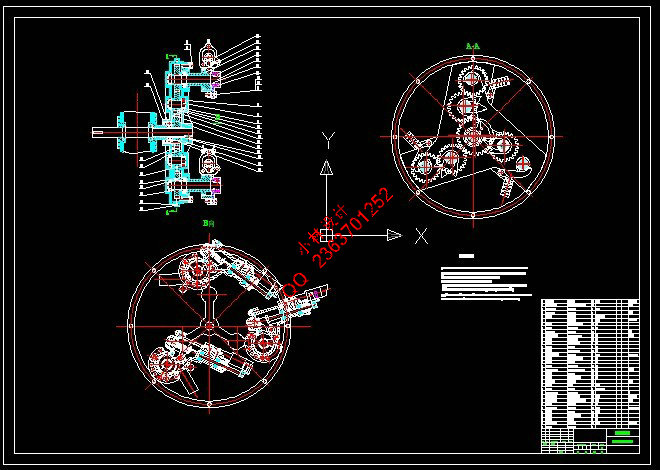
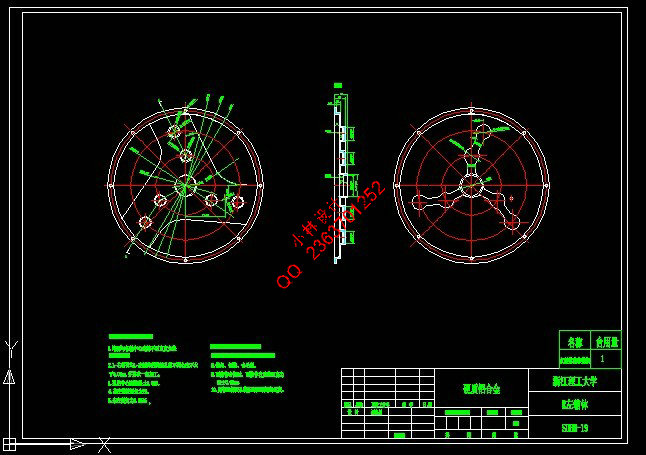
4.根据机构优化后的结构参数,在CAD2008软件中对水稻钵苗移栽机构进行整体的结构设计与各零部件的二维设计。
5.在ug8.0三维实体建模软件中完成各零部件的建模与机构的装配。
关键词:水稻钵苗移栽;行星系移栽机构;椭圆-不完全非圆齿轮;参数优化;设计;
Parameter Optimization and Design of Rotary Rice Bowl Seedling Transplanting Mechanism
Abstract
Rice bowl seedling transplanting is a transplanting technology with bowl seedling ,which plays an important part in the process of rice cultivation. The nutrient soil is fully reserved with rice seedling through bowl seedling technology ,so it barely hurts seedlings and makes them grow and mature faster, furthermore, it increases rice production;Transplanting takes full advantage of the light and heat resources, which makes climate compensation to rice seedlings and shifts crop fertility to an earlier date,Therefore the rice bowl seedling transplanting can produce substantial economic and social benefits. However, compared with other countries and regions, the mechanization level of rice cultivation in China is relatively low, and the degree of mechanization is also the lowest compared to other domestic rice production processes.Therefore the study of a new rice bowl seedling transplanting mechanism has a very important significance in mechanized cultivation and high-yielding of rice .
Through comparative analysis of rice bowl seedling transplanting mechanisms at home and abroad, this paper comes up with a new type of rice bowl seedling transplanting mechanism with which the transplanter can achieve high efficient transplanting—rice bowl seedling transplanting mechanism of planetary gear train with ellipse gears and incomplete non-circular gear. The rice bowl seedling transplanting mechanism includes two parts : drive part and transplanting arms ,the drive part consists of non-uniform intermittent transmission and non-uniform transmission mechanism, and the transplanting arms are used for the completion of fetching and pushing seedlings.This transplanting mechanism has applied for inventive patent (application number : 201210344077.1)and utility model pantent (patent number: ZL201220474441.1) is authorized.
The main content of this paper is listed as bellow:
1.According to the requirements of the agronomic characteristics and work trajectory of rice bowl seedling transplanting, invent the rice bowl seedling transplanting mechanism of planetary gear train with ellipse gears and incomplete non-circular gear, The rotary drive mechanism has a good stability and high efficiency.
2.Analyze the work principle of the rice bowl seedling transplanting mechanism ,build kinematics model and analyze transmission characteristics of this mechanism.
3.Through the software of aided analysis and optimization of rice bowl seedling transplanting mechanism, search a group of structure parameters: a = 23.069mm, k = 0.994, α = 291°, λ = 6 °,δ = 29 °, φ0 = -39 °, S = 152mm.
4.According to the optimized structure parameters of the mechanism, design the overall structure and complete two-dimensional drawings of all parts in CAD2008.
5.Establish the three-dimensional model of all parts of this rice bowl seedling transplanting mechanism and complete the assembly in ug8.0。
Keywords: Rice bowl seedling transplanting;transplanting mechanism of planetary gear train; ellipse gears- incomplete non-circular gear;parameter optimization;design
目 录
摘 要 2
Abstract 2
第一章 绪论 7
1.1 本文研究目的与意义 7
1.2 水稻钵苗移栽机构的发展概况 8
1.2.1 国外发展概况 8
1.2.2 国内发展概况 10
1.3 研究目标与方案实现 13
1.3.1 研究目标 14
1.3.2 实现方案 14
1.4 本文的工作安排 16
1.5本章小结 17
第二章 旋转式水稻钵苗移栽机构的运动学分析 18
2.1 旋转式水稻钵苗移栽机构的工作原理 18
2.2 运动学分析符号及相关说明 19
2.3 椭圆齿轮-不完全非圆齿轮传动特性分析 20
2.3.1 椭圆齿轮-不完全非圆齿轮节曲线模型建立 20
2.3.2 传动比分析 24
2.4 椭圆齿轮传动特性分析 27
2.4.1 椭圆齿轮节曲线模型建立 27
2.4.2 传动比分析 28
2.5 椭圆-不完全非圆齿轮行星轮系移栽机构运动学模型的建立 29
2.5.1 位移方程 29
2.5.2 速度分析 31
2.5.3 加速度分析 32
2.6 本章小结 32
第三章 旋转式水稻钵苗移栽机构辅助分析与优化软件的运用 34
3.1 优化软件的运用思路 34
3.2 旋转式水稻钵苗移栽机构的优化软件界面 35
3.3 数据处理 36
3.4 本章小结 37
第四章 旋转式水稻钵苗移栽机构的结构设计 38
4.1旋转式水稻钵苗移栽机构的整体结构设计 38
4.2 驱动部分设计 40
4.2.1 非匀速间歇传动机构的设计 40
4.2.2 非匀速传动机构的设计 41
4.3 移栽臂组成零件的设计 41
4.3.1拨叉的设计 42
4.3.2推秧爪与弹簧片的设计 43
4.4 本章小结 44
第五章 旋转式水稻钵苗移栽机构的三维建模 45
5.1椭圆齿轮与非圆齿轮的实体建模 45
5.1.1椭圆齿轮的三维建模 45
5.1.2非圆齿轮的三维建模 46
5.2 其他零部件的三维建模 47
5.3本章小结 47
第六章 总结 48
6.1 总结 48
参考文献 49
|