|
设计描述:
文档包括:
word说明书一份,共33页,约15000字
CAD版本图纸,共12张
目 录
第一章 绪论................................................................................................1
§1.1研究背景及意义......................................................................................1
§1.2架空线路巡线机器人与机器人仿真文献综述......................................2
1.2.1架空线路巡线机器人研究概况...............................................................2
1.2.2机器人仿真简介.......................................................................................6
§1.3本文主要内容..........................................................................................7
第二章 巡线机器人本体结构的设计与三维建模………………………..8
§2.1线机器人本体结构设计..........................................................................8
2.11方案要求....................................................................................................8
2.12总体结构...................................................................................................10
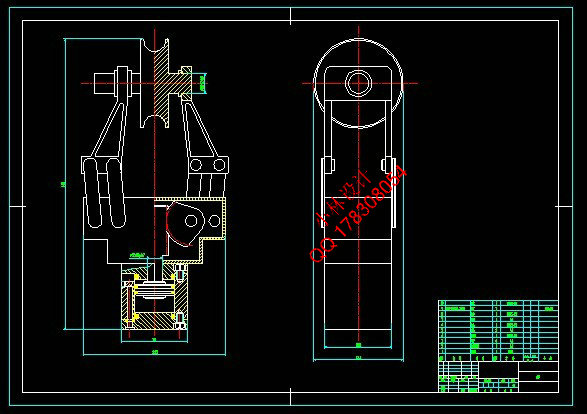
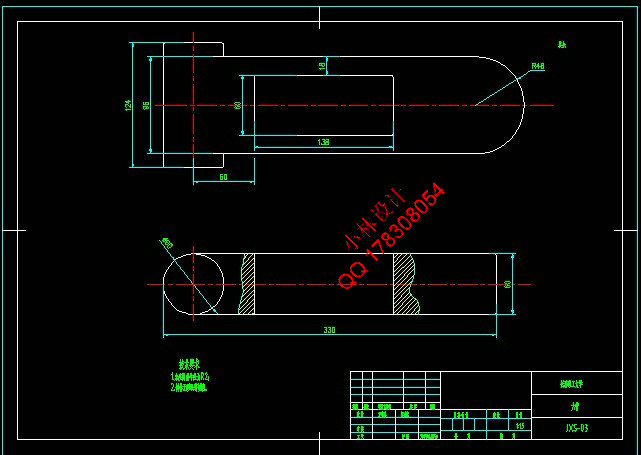
2.13柔性臂.......................................................................................................10
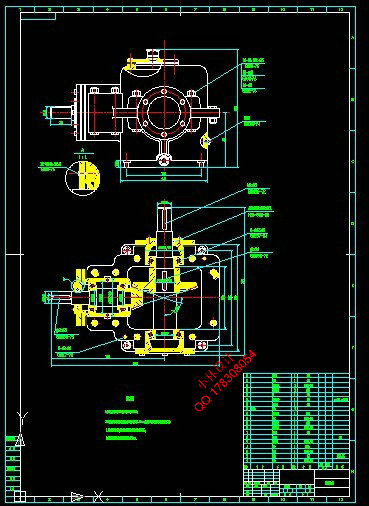
2.14驱动装置...................................................................................................13
2.15刹车制动装置...........................................................................................14
2.16手掌开合装置...........................................................................................14
§2.2器人的建模.............................................................................................15
第三章 巡线机器人机械手运动学分析......................................................18
§3.1引言........................................................................................................18
§3.2数学基础理论........................................................................................18
3.2.1刚体位姿的表示与齐次变换 ............................................................18
3.2.2机器人运动学方程的D-H表示法........................................................20
§3.3巡线机器人四自由度机械手运动学分析............................................22
3.3.1机械手的正运动学分析.........................................................................22
3.3.2机械手的逆运动学分析.........................................................................24
3.3.3机械手关节速度和雅可比矩阵.............................................................27
§3.4本章小结...............................................................................................29
第四章 总结与展望....................................................................................30
§4.1本文总结................................................................................................30
§4.2后续工作与展望....................................................................................30
致谢..................................................................................................................31
参考文献...........................................................................................................32
第一章 绪 论
§1.1研究背景及意义
电力系统最重要的任务是提供高质量和高可靠性的电力。电力传输必须依靠高压输电线路,它的安全稳定运行直接影响电力系统的可靠性。由于输电线路分布点多、面广,绝大部分远离城镇,所处地形复杂,自然环境恶劣,且电力线及杆塔附件长期暴露在野外,会受到持续的机械张力、电气闪络、材料老化的影响而产生断股、磨损、腐蚀等损伤,如不及时修复更换,原来微小的破损和缺陷就可能扩大,最终导致严重事故,造成大面积停电,从而造成极大的经济损失和严重的社会影响。所以,必须对输电线路进行定期巡视检查,随时掌握和了解输电线路的运行情况以及线路周围环境和线路保护区的变化情况,以便及时发现和消除隐患,预防事故的发生,确保供电安全。目前,对输电线路的巡检主要采用两种方法,即地面人工目测法和直升飞机航测法。前者的巡检精度低,劳动强度大,且存在巡检盲区。部分地区大雪封山时,车辆和行人无法进入(如图1.1所示);在深山还有野兽出没,这给巡视人员带来了很大的安全隐患;后者则存在飞行安全隐患且巡线费用昂贵(如图1.2所示)。如果用直升机巡视替代地面巡视,则每100公里1年巡视费用同塔双回线需217.92万元(单回线136万元)。如果用直升机在整个东北电网覆盖地区巡视则需超过5000万元。费用过于昂贵,直接限制了直升机巡视的广泛推广。
由于巡线机器人可以克服上述缺陷,因此,巡线机器人已成为特种机器领域的一个研究热点。巡线机器人不仅可以减轻工人巡线的劳动强度,降低高压输电的运行维护成本,还可以提高巡检作业的质量和科学管理技术水平,对于增强电力生产自动化综合能力,创造更高的经济效益和社会效益都具有重要意义。
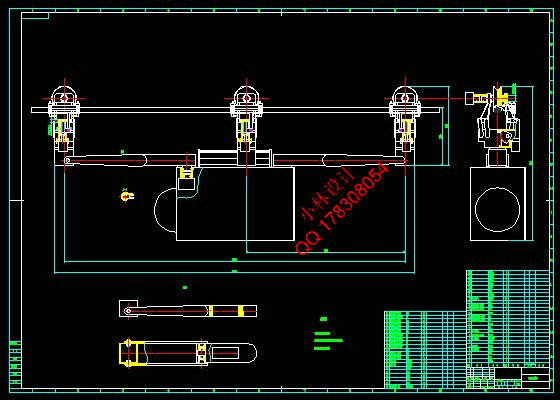
巡线机器人悬挂于架空避雷线上,并以此为行驶作业路径,通过自动控制方式完成输电线路巡检作业,及对线路的机械电气故障,包括绝缘子劣化和污秽、导线的机械破损、连接金具机械松脱等故障进行检测。其特殊的作业环境要求机器人能够沿输电导线全程运行,包括沿输电导线的直线段和耐张线段实现滚动爬行,跨越及避让悬垂线夹、悬垂绝缘子、防振锤、耐张线夹等结构型障碍物。
因此,机器人的本体设计是整机设计中一个相当重要的部分,需经过多次反复才能完成;在进行机器人结构分析和设计时,需要建立一定的实验环境(导线物理模型、障碍物等),对样机进行多次实验以检验其是否能达到预期的目标,这就导致其设计的周期长、设计效率低以及改型工作量大等缺点。此外,样机的单机制造增加了成本。在竞争的市场条件下,基于物理样机的设计验证过程严重地制约了产品质量的提高、成本的降低及市场推广应用。
|