 |
|


|
设计名称 |
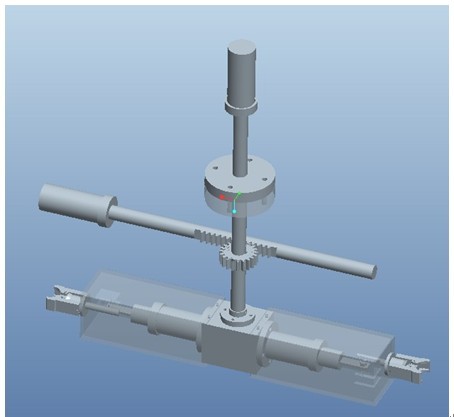
镗铣加工中心换刀机械手部件设计[Proe三维] |
 |
|
设计编号 |
Z036 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
13000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括:
CAD版本图纸,共20张
摘 要 活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因
此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。 削的时间只占整个工作时间的30%左右,其余的大部分时间都花在安装、调整刀具、装卸、搬运零件 和检查加工精度等辅助工作上。自动换刀装置是数控加工中心在工件的一次装夹中实现多道工序加工
不可缺少的装置。为充分发挥机床的作用,数控中心均配有自动换刀装置。 处理等方面,无论数量,品质还是性能方面都不能完全满足工业发展的需要。本课题重点解决的问题
:换刀机械手部件的结构设计,对关键零件进行校核以及尺寸的优化选取。
,准确换刀的功能。
械手零件进行三维建模,并建立总装模型。
production process. Although the robot is not as staffing flexibility, but it has repeated the work and labor, I do not know fatigue, not afraid of danger, the the snatch weight of force than manual force, Therefore, the robot has been subject to many
sectors, and increasingly has been applied more widely. processes. Whole process in general CNC machine tools for cutting real time accounted for only about 30% of the entire working time, most of the rest of the time is spent on installation, adjustment tool, loading and unloading, handling parts and check processing accuracy auxiliary work on Automatic tool changer CNC machining center in one clamping of the workpiece to achieve multi-channel processing indispensable device. In order to give full play to the role of the machine tool, CNC centers are equipped with
automatic tool changer. design of the robot. Industrial robot is mainly used for machining, casting, heat treatment, regardless of the quantity, quality or performance are not fully meet the needs of industrial development. Focused on solving the problem of the subject: A tool of the structural design of the robot components, select the check key parts and size
optimization.
drive system to enable it to meet the fast, smooth and accurate tool.
design, the design of the shaft bearing. Pro / E 3D modeling, and all parts of gripper
rotary arm claw robot. |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
