|
设计描述:
文档包括:
word说明书一份,共70页,约21000字
CAD版本图纸,共8张
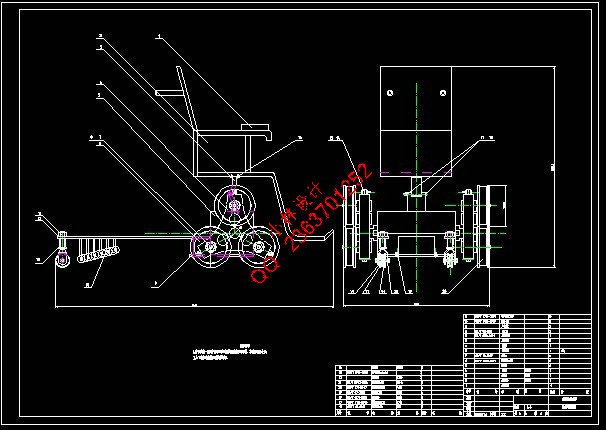
爬楼梯的自行轮椅车设计(控制)
摘 要:轮椅在老年人和残疾人的生活中扮演着重要的角色,尤其是随着人口老龄化和残疾人数量增加等问题的日益严重,轮椅车将更加成为改善这一特殊人群的生活必备工具。然而,普通的手动和电动轮椅都不能够实现爬楼和翻越障碍的功能,使使用者的行动自由度受到了极大的限制。针对这个问题,本文研究了一种既可在平地使用,又能上下台阶的多功能爬楼梯轮椅,完成了系统方案设计和控制系统方案的设计。
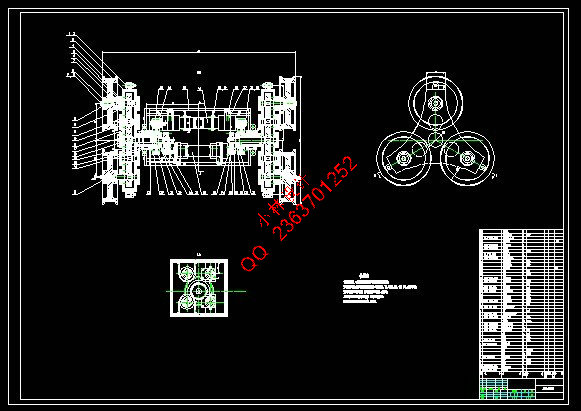
本文在充分研究目前爬楼轮椅的国内外产品及相关文献,经综合比较分析,采用了以有刷直流电机驱动的基于行星轮结构的爬楼装置,并在此基础上详细论述了轮椅车的驱动控制方案。针对本文中所使用的双电机分别驱动左右轮的方案,提出了双电机同步控制的一种解决方案:采用主从式控制结构,为解决主从式控制系统的跟踪滞后问题,采用了带速度负反馈的PID算法。选用C8051FO20作为控制器极大地简化了外围电路设计及软件编程,仿真结果表明本文所采用的控制方案具有比较好的同步效果。
关键词:爬楼轮椅 行星轮 双电机同步控制 pid算法
design of Automatically stair-climbing walking wheelchair (control)
Student name:Gao Jun Class: 080316
Supervisor: Yuan Kun
Abstrac: Wheelchair play an important role in the life of the elderly and persons with disabilities, especially with the increasingly serious problem of an aging population and the increase in the number of Persons with Disabilities, the wheelchair will be more and more become an essential tool to improve the lives of this special population. However, the normal manual or electric wheelchairs are disable to have the function of climbing stairs and climb over obstacles, so that the user's freedom of action has been extremely limited. in connection with this issue, this study can both be used on flat ground, multi-function but also up and down stairs, stair climbing wheelchair, completed the design of the system design and control system program.
In this paper, by the climbing stairs wheelchair domestic and foreign products and related literature comprehensive comparative analysis, using a brush DC motor drive based on the structure of the planetary wheel climbing stairs device, and on this basis are discussed in detail wheelchair drive control program. Used herein, the dual motor drive the left and right wheels, dual-motor synchronous control solution: a master-slave control structure, to solve the master-slave control system tracking lag, with negative feedback of the PID algorithm. The selection C8051FO20 as the controller greatly simplifies the peripheral circuit design and software programming, simulation results show that using this control scheme has good synchronization effect.
Key words: Climbing stairs wheelchair planetary gear motor synchronous control pid algorithm
Signature of Supervisor:
目录
目录 1
1 绪论 3
1.1 课题研究原因和意义 3
1.1.1 课题研究的原因 3
1.1.2 课题研究的意义 3
1.2 目前国内外研究状况 3
1.2.1 轮组式 4
1.2.2 履带式 5
1.2.3 腿式 6
1.2.4 复合式 6
1.3 目前研究中所存在问题 7
2 系统方案设计 9
2.1 系统方案确定 9
2.2智能电动越障爬楼轮椅系统构成 10
2.2.1底盘系统 10
2.2.2座椅姿态调整系统 15
2.2.3驱动控制系统 16
3 轮椅驱动模块设计 18
3.1 电机的选择 18
3.2 电机工作原理 20
3.3 电源的选择 23
3.4控制核心C8051F020 23
3.4.1 C8051FO20概述 23
3.4.2主要性能参数 24
3.5电机转速控制 25
3.5.1电机转速控制原理 25
3.5.2电机转速控制方案 26
3.6 电机驱动电路 27
4 系统控制方案设计 30
4. 1操纵杆设计 30
4. 2双电机同步控制方案 32
4.2.1 并行控制 32
4.2.2 主从控制 33
5 轮椅车控制算法设计 35
5.1 速度检测电路 35
5.2 PID控制方法 36
5.2.1 PID控制方法介绍 36
5.2.2 数字式增量PID控制算法 38
5.2.3 标准PID算法的改进 39
5.2.4 干扰的抑制 40
5.2.5 PID调节器的参数整定 40
6 轮椅车控制模块的数学模型 43
6.1 系统运行方框图 43
6.2系统运行原理 44
6.3建立数学模型 44
7 软件实现 50
7.1 单片机片内的资源配置 50
7.1.1 单片机内各功能模块配置 50
7.1.2 单片机的端口配置 51
7.2 程序模块介绍 51
7.2.1 初始化模块 52
7.2.2 测速子程序 54
7.2.3 控制程序 56
7.2.3 键盘扫描程序 58
7.3 总程序 58
总结 68
参考文献 69
致谢 70
|