|
设计描述:
文档包括:
word说明书一份,共39页,约12000字
CAD版本图纸,共16张
PROE三维图纸,一套
摘要
目前在织机中有三种类型:分别是剑杆织机、喷水织机和喷气织机,剑杆织机因结构简单,成本低而应用广泛。我国是一个纺织大国,但由于我国在现代剑杆织机研究不足,当今剑杆织机机构的知识产权不在我国,就不可能将企业做大、做出品牌。要改变中高级剑杆织机生产设备主要依靠进口的局面,必须走自主创新的道路,需要从剑杆织机核心机构开始做基础性研究工作。剑杆织机的打纬机构主要有三种:共轭凸轮机构、四连杆机构和六连杆机构。
本文综述了目前国内外织机发展的现状和打纬机构的研究情况,提出了一种新的打纬机构:椭圆齿轮-曲柄摇杆打纬机构。为分析该机构的打纬性能,建立了机构的运动学数学模型,列出位移、速度和加速度方程。采用Visual Basic 6.0软件编写了辅助分析软件,得到打纬机构的运动学特性曲线。
了解和分析机构参数对运动规律的影响,通过对机构运动目标的确定,来优化打纬机构的各参数,本文采用基于VB6.0编写的可视化软件进行人机交互对话优化方法,结合实际设计时的结构限制,取得了一组最佳参数。
关键字:打纬机构;椭圆齿轮;曲柄摇杆;运动学分析;参数分析
Abstract
At present,there are three types looms,namely the rapier,water and air-jet looms,rapier has broad application because of its simple structure and low cost.China is a big textile country,but because lacking research in modem rapier,rapier in today’s intellectual property is not in our country,which restricted the domestic enterprises become strong and make famous brand,to change the situation that high product equipment of rapier mainly depends on imports,must take the road of independent innovation and should start do basic research from core component of the rapier.Rapier of the beating—up mechanism has three main types:conjugate cam,four-bar linkage and six—bar linkage.
This paper reviewed the current development of looms boom domestic and foreign and also the situation of the beating-up mechanism study,present a new type beating-up mechanism:elliptical gear—crank-rocker beating—up mechanism,and then establish the kinematics mathematical model of beating—up mechanism,and the equation of displacement ,velocity and acceleration will be list,for analysis the performance of beating—up mechanism,kinematics analysis of the new beating-up mechanism was made with Visual Basic 6.0 software,output beating-up mechanism’s kinematics curve.
Understand and analyses the effect of parameters on law of motion, by exterminating the target of mechanism motion, based on the visualization software of VB6.0 for interactive dialogue optimization methods,obtained a set of best Parameters with the structure restrictions while doing actual design.
Key words:beating--up mechanism;elliptic gear;crank-rocker;kinematics analysis;parameter analysis ;
目 录
摘 要
Abstract
第一章 绪论 1
1.1引言......................................................................................................................................1
1.2几种典型的打纬机构 2
1.2.1 概述 2
1.2.2 四连杆打纬机构 2
1.2.3 六连杆打纬机构 5
1.2.4 共轭凸轮打纬机构 6
1.3打纬机构国内外研究现状 7
第二章 椭圆齿轮-曲柄摇杆打纬机构运动学建模 8
2.1椭圆齿轮一曲柄摇杆打纬机构简介 8
2.2机构运动学目标 8
2.3椭圆齿轮一曲柄摇杆的打纬机构运动学模型的建立 9
2.3.1从动椭圆齿轮角位移、角速度和角加速度数学模型建立 9
2.3.2摇杆的角位移、角速度和角加速度数学模型建立 11
2.3.3 打纬点的角位移、角速度和角加速度数学模型建立 12
第三章 辅助分析软件的功能及其使用方法 14
3.1 打纬机构运动学辅助分析初始界面 14
3.2打纬机构运动学辅助分析运行界面 15
3.3 打纬机构运动学辅助分析模拟界面 15
3.4进步界面 16
第四章 机构参数对运动规律的影响 18
4.1 椭圆偏心率k的影响 18
4.2 初始安装角δ的影响 18
4.3 曲柄、连杆长度的影响 19
4.4 摇杆运动性能分析 20
第五章 机构的结构设计 22
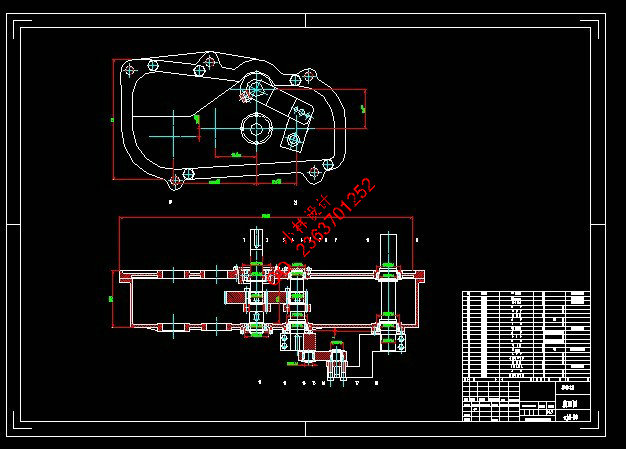
5.1 箱体的设计 22
5.1.1 箱体的结构约束 22
5.1.2 新机构参数的选择 23
5.1.3 箱体的结构设计 23
5.2 椭圆齿轮的三维模型建立 24
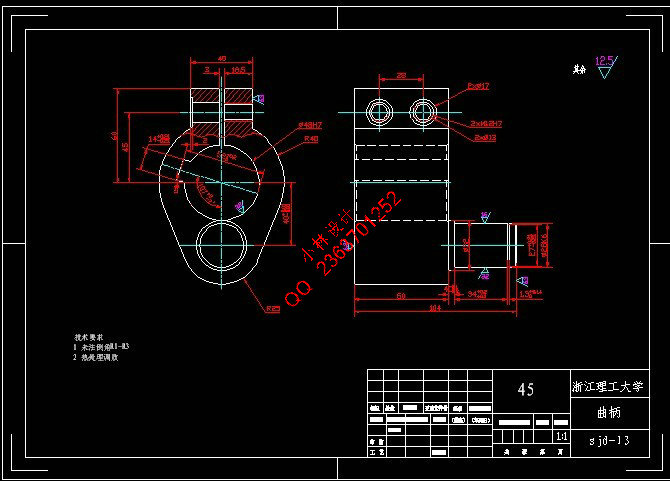
5.3 曲柄的设计和图纸 25
5.4 摇杆的设计和图纸 26
5.5轴的设计和图纸 27
5.5.1 轴的材料选择 27
5.5.2 轴的结构设计 27
5.5.3提高轴的强度措施 28
5.5.4 轴的强度校核 29
5.6 三维装配图 29
第六章 总结 31
参考文献 32
致 谢 33
|