 |
|


|
设计名称 |
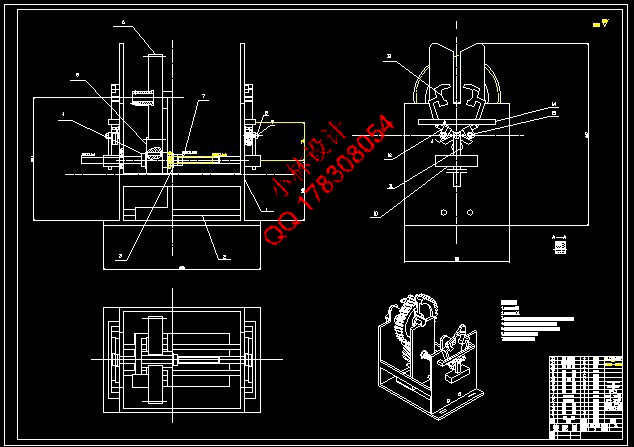
高空作业机器人设计 |
 |
|
设计编号 |
Z065 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
15000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括: CAD版本图纸,共15张
摘 要 代替人类完成。裸高压导线输电线路的高空接线工作,一直是困扰高空作业人员的棘手问题,由于其 危险性极大,作业条件艰难,仅靠人力很难做到,所以都是借助高空作业车的帮助来实现的。近年来 ,越来越多的人致力于多自由度的高空全自动绕线装置的研究,试图找到一种简便、经济、安全、有 效的方法,来解决这一难题。因此,无攀爬式全自动高空接线机器人应运而生,该机器人通过实现高 空握持导线、不规则的圆周绕线运动和横向进给运动等动作,来完成绕线任务。通过对各种方案的对
比,决定采用斜齿轮传动绕线,螺旋传动进给来实现主要功能。 有很高的可行性,适用于各种工作场合。
关键词:无攀爬式;自动绕线;斜齿轮传动;进给;螺旋传动
done by robot, manipulator included. The connection of bare high-tension wire has always been troubled steeplejacks. It’s extremely dangerous, and the work condition is hard, so people have to get help from the aloft working car. In recent years, more and more people are concentrated on development of device of full-automatic high altitude wiring. They try to find a convenient, economical, safely and efficient program to solve this problem. Then the no climbing full-automatic high altitude wiring robot comes out. It accomplishes its task by holding wires in high attitude, coiling in circle irregularly and transverse feed. Through the comparison of several programs, the helical gearing and
screw driven are used to wiring and feed, respectively. applicable, efficient and safely. It complies with the development of era and can work in any conditions.
Key words: no climbing; full-automatic wiring; helical gearing; feed; screw driven
|
|
部分图纸 截图 |
  |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
