 |
|


|
设计名称 |
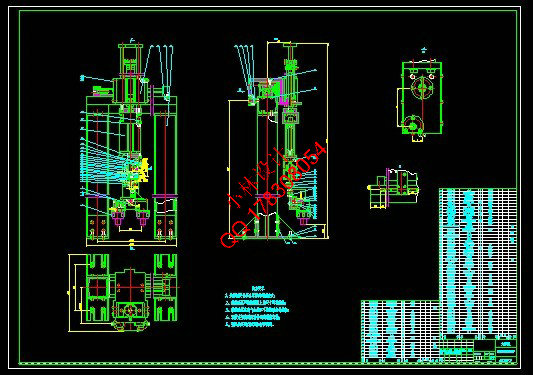
数控车床上下工件机械手 |
 |
|
设计编号 |
V130 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
17000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括: CAD版本图纸,共6张
现代工业的发展和竞争的加剧,对加工效率提出了新的要求,数控车床工件装卸自动化就成为当前制造厂家对 机床的重要需求之一。为了满足用户的需求,当前中国的机床制造厂开始在部分数控车床上配置工件自动上下 料机械手。但如果采用伺服电机驱动和控制其成本高、结构复杂、速度慢、工作效率较低;如果采用液压驱动 ,其泄漏对数控要求的清洁环境造成一定的副面影响。随着气动技术的不断发展,气体驱动也能成为机械手的
驱动力量,其成本底,结构简单,工作效率高,清洁,再加上PLC控制系统实现机电气一体化控制。 机应用中存在的高成本和低效率的局限。论文完成的主要设计工作包括以下几个方面:(1)设计了模块化气动装 卸机械手的总体结构;(2)研究了大跨度气缸的固定支撑形式;(3)研究了水平运动气缸的防侧翻技术;(4)研究并 实现了气缸输出杆高精度柔性调节技术(5)初步设计了气动控制回路和PLC控制系统。
关键词:机械手;自动化;上下料;气体驱动 determination of overall scheme, design of mechanical structure design and important parts. Along with the development of modern industry and the competition put forward new requirements to processing efficiency, numerical control lathe workpiece loading and unloading automation becomes the current manufacturer's one of the important requirements for machine tools. In order to meet the needs of users, the current China's machine tool manufacturers began on the part of numerical control lathe automatic up-down material manipulator configuration artifacts.But, if the servo motor drive and control its high cost, complex structure, slow speed, the efficiency is low; If adopts hydraulic drive, the leak on the CNC requirements of clean environment certain side effects.With the continuous development of pneumatic technology, gas drive also can become a driving force of the manipulator, end of the cost, simple structure, high efficiency, clean, coupled with the PLC control system to realize integration of mechanical and electrical gas
control. pneumatic manipulator, and implement numerical control lathe automatic loading and unloading of workpiece, overcome existing in the application of servo motor limitations of high cost and low efficiency. The thesis completed the main design work includes the following several aspects: (1) the overall structure of the design of modular pneumatic loading and unloading manipulator; (2) study the long-span cylinder fixed support form; (3) studies the technique of side flip horizontal motion cylinder; (4) the research output and implements the cylinder rod (5) high precision flexible adjustment technology pneumatic control loop and PLC control system is designed.
Key words:manipulator;automation;up-down material ;gas drive
目录 录...............................................................................................
................................................................. VI |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
