 |
|


|
设计名称 |
农作物桔杆打捆机构设计 |
 |
|
设计编号 |
w054 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
8000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
Word版设计说明书1份,共26页,约8000字 CAD版本图纸,共26张
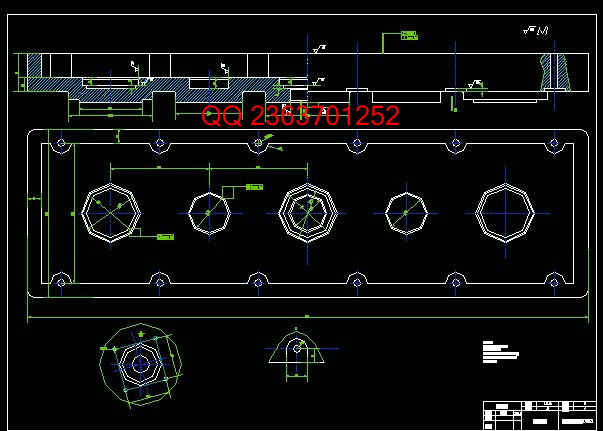
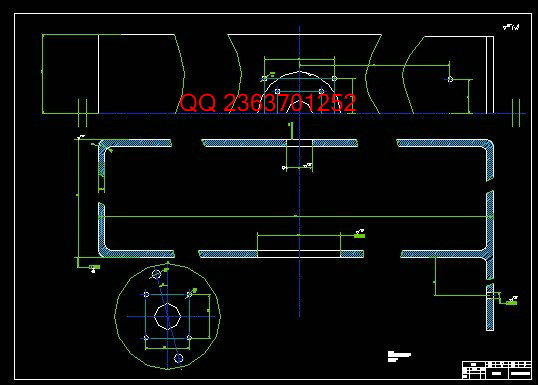
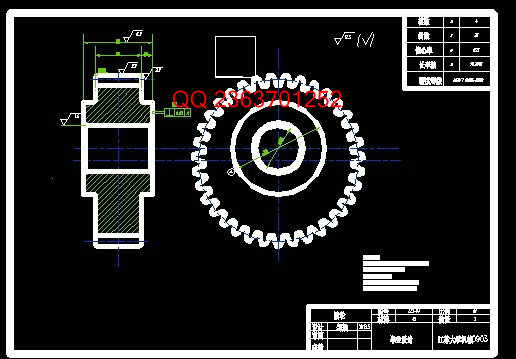
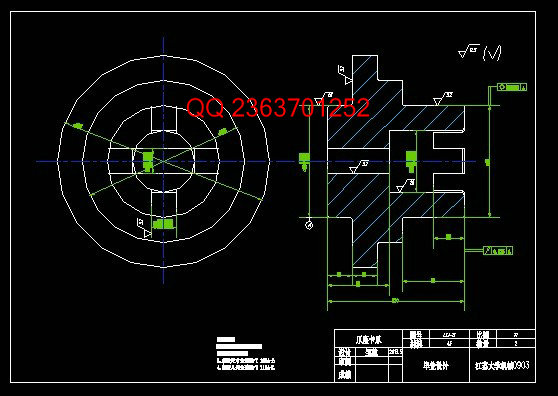
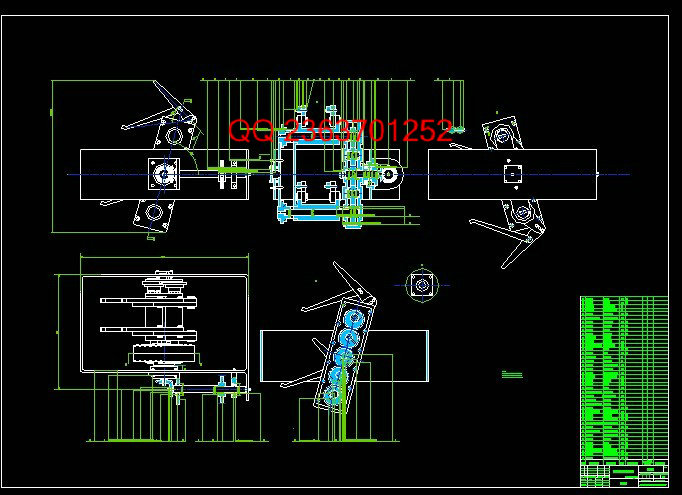
椭圆齿轮行星系打捆机构设计
摘要:通过对目前市场上广泛应用的曲柄摇杆式打捆机的工作过程和运动特性分析,发现将原有的曲柄摇杆机构转变为椭圆齿轮驱动的转臂式打捆机构,可以获得更高的工作效率和运动平稳性。本文设计了一种椭圆齿轮行星系打捆机构,设计的思路是将输入动力传递给齿轮箱内的椭圆齿轮,使行星椭圆齿轮带动搂草爪达到预期的运动轨迹。通过建立其运动学分析模型,在给定安装尺寸下获得了满意的结构参数和工作参数,并利用PRO/E5.0软件对其零件进行三维建模、装配与分析,取得了满意的结果。最后,完成了该打捆机构的二维总装配图以及非标件的二维零件图。 Design of Raking-straw Mechanism Based on Elliptic Gears Planetary System Abstract: Through the analysis of the working process and motion characteristic of the crank rocker type is widely used at present on the market bundling machine, we found that change the original of the crank rocker mechanism into rotary bundling mechanism of elliptical gear drive, can obtain higher working efficiency and smooth movement.This paper describes the design of a planetary elliptic gears binding mechanism,the design idea is to divide the input power to the elliptic gears in the gear box,then the planetary elliptic gear driving raking claws reached the desired trajectory。Through the establishment of the kinematic analysis model, I obtained the satisfactory structural parameters and operating parameters in the given dimension, and the use of PRO/E5.0 software for 3D modeling, the assembly and analysis, then achieved satisfactory results .Finally, I finished the 2D assembly drawing the binding mechanism and non-standard pieces of the 2D part drawing.
Keyword:Baler, Raking-straw mechanism, Elliptic gear, Mechanism design
第一章 绪 论 6
第三章 打捆机构结构设计 9
总 结 20 |
|
部分图纸 截图 |
     |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
