 |
|


|
设计名称 |
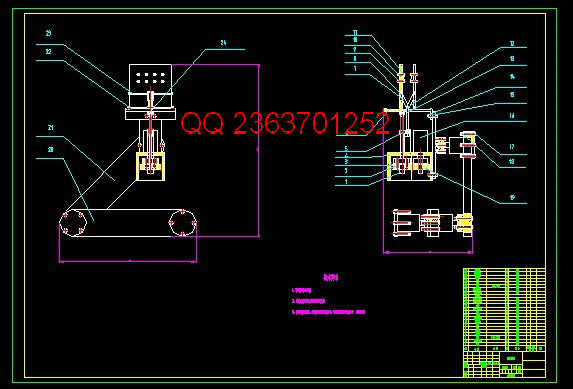
壁面爬行机械手结构设计 |
 |
|
设计编号 |
w157 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
14000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
Word版设计说明书1份,共31页,约14000字 CAD版本图纸,共4张
壁面爬行机械手结构设计 关键词:驱动方式;传动方式;机械手
In today's mass manufacturing, the enterprises to improve production efficiency, ensure product quality, generally attaches great importance to the production process automation, industrial robot as an important member of automation production line by enterprise gradually is accepted and adopted. Industrial robot technology level and application level in a certain extent reflects a country's industrial automation level, at the same time, robots can replace human working in the special environment, to accomplish the complex requirement of working environment. At present, the industrial robot is mainly responsible for welding, spraying, such as transportation and stacking repetitive work and labor intensity greatlyThis paper will design a four degree of freedom of industrial robots, for use in nuclear waste deposit tank send weld detector. First of all, this article will design manipulator gripper, arm, forearm, such as structure, and then calculate the necessary data, choose the right means of transmission, drive mode and connection mode. To complete the manipulator overall design, in order to meet the design requirements.
|
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
