|
设计描述:
文档包括:
Word版设计说明书1份,共66页,约19000字
外文翻译一份
开题报告一份
CAD版本图纸,共1张
直线倒立摆的稳定控制算法设计
摘要
本文首先利用牛顿力学分析的方法和拉格朗日法建立了直线一级、二级、三级倒立摆实物系统的线性状态方程,并在此基础上分析了该系统是不稳定的,同时又是能控的和能观的。基于此本文设计了直线倒立摆系统的机械本体部分,研究了直线一级、二级、三级倒立摆系统的 PID、LQR和状态空间极点配置控制算法,同时利用 MATLAB/Simulink对各个算法进行分析,由仿真结果表明:对于像倒立摆这样的非线性模型,通过对其数学模型的建立,设计相应的控制器,并对其实现控制是可行的。
关键词:直线倒立摆;PID;LQR;状态空间极点配置;仿真
The stability of linear inverted pendulum control algorithm design
Abstract
In this paper,we firstly use the Newton mechanics analysis method and the Lagrange method to establish the linear level 1,level 2,level 3 inverted pendulum linear state equation of real system.In the meantime,the system is unstable by analyzing the linear state equation,but it is also controllable and observable.And then we describe on the physical system of the linear inverted pendulum.This paper studied the linear level 1,level 2,level 3 of the inverted pendulum system PID,LQR and state space pole assignment control algorithm,at the same time analyze various algorithms with MATLAB/Simulink.By the simulation results show that:Be similary to inverted pendulum is for the non-linear model,through its mathematical model,the appropriate design of controller,and in its implementation control is feasiblly.
Key words:linear inverted pendulum;PID;LQR;state space pole configuration;
simulation
目 录
1 绪论 1
1.1前言 1
1.2倒立摆系统研究背景及意义 1
1.3国内外倒立摆控制研究发展及现状 2
1.4本文主要工作 4
2 倒立摆机械系统设计及实现 5
2.1 倒立摆简介 5
2.2 倒立摆工作特性和工作原理 5
2.2.1工作特性 5
2.2.2系统工作原理 5
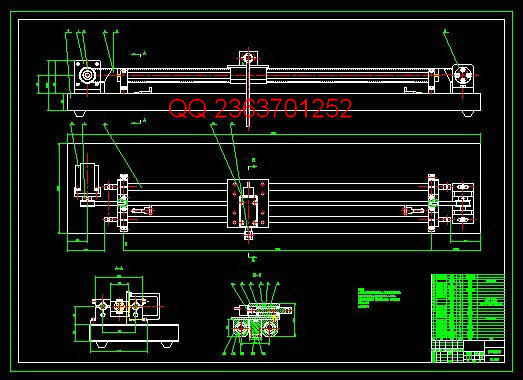
2.3系统机械结构设计 6
2.3.1底座设计 6
2.3.2小车部分设计 6
2.3.3 传动部分设计 7
2.3.4 步进电机选择 7
3 一级直线倒立摆系统的建模分析与仿真 10
3.1一级倒立摆模型分析 10
3.1.1系统可观可控性分析 13
3.1.2系统阶跃响应分析 14
3.2一级直线倒立摆控制器设计与仿真 15
3.2.1PID控制器设计及算法仿真 15
3.2.2 LQR控制器设计及算法仿真 18
3.2.3状态空间极点配置控制设计及仿真 20
3.2.4小结 22
4 二级直线倒立摆系统的建模分析与仿真 24
4.1二级倒立摆模型的分析 24
4.1.1二级倒立摆稳定性分析 29
4.1.2能控性能观性分析 29
4.2二级直线倒立摆控制器设计与仿真 30
4.2.1LQR控制器设计及算法仿真 30
4.2.2状态空间极点配置控制设计及仿真 31
4.2.3小结 32
5 三级直线倒立摆系统建模分析与仿真 34
5.1二级倒立摆模型分析 34
5.1.1三级倒立摆稳定性分析 39
5.1.2能控性能观性分析 39
5.2三级直线倒立摆控制器设计与仿真 40
5.2.1LQR控制器设计及算法仿真 40
5.2.2状态空间极点配置控制设计及仿真 41
5.2.3小结 43
6 总结与展望 44
参考文献 45
致谢 46
毕业设计(论文)知识产权声明 47
毕业设计(论文)独创性声明 48
附录 49
|