 |
|


|
设计名称 |
立式精锻机自动上料机械手设计--大臂升降及回转机构设计 |
 |
|
设计编号 |
n026 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
12000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括: 设计word版本说明书一份,共30页,约12000字
CAD版本图纸,共2张
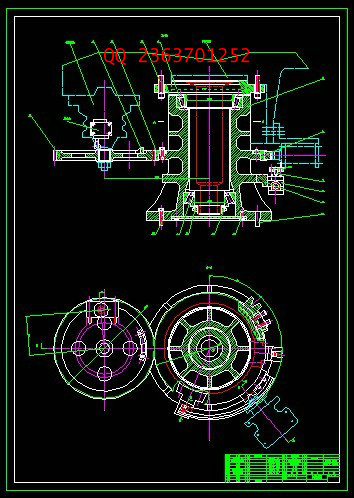
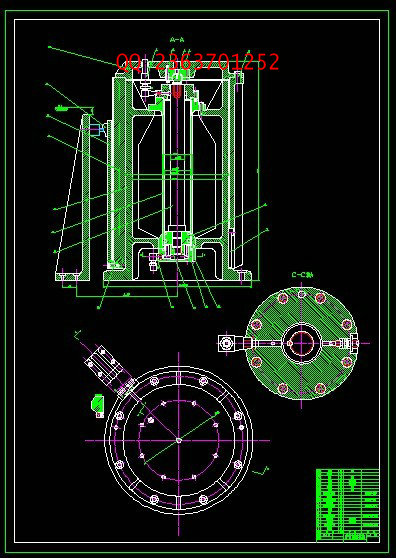
工业机械手是一种在工业生产中代替人执行危险或者重复工作的自动化装置,按照设定的程序、轨迹和要求执行抓取、搬运工作或操持工具或进行操作。它主要有执行机构、驱动系统、和控制系统组成。本文简要介绍了机械手与其它设备的配置关系及工作过程,并对机械手的动作进行了分析,详细论述了机械手总体方案的设计,特别是对实现预期要求动作的各种方案进行了比较分析,进而得出最终方案。根据手臂的动作要求,采用圆柱坐标型机械手;机械手的自由度数为四个,它们是大臂的升降和回转运动,小臂的伸缩运动,手腕的回转运动;机械手手部结构采用两支点回转型;机械手驱动方式采用液压驱动。控制方式为点位程序控制。本次设计主要进行大臂升降及回转机构设计、手臂及伸缩结构设计、手部结构设计,重点进行大臂升降及回转设计并且对液压系统进行理论分析和比较。 关 键 词 双作用式油缸; 点位控制; 液压系统 ; 结构设计
1 引言(或绪论)………………………………………………1 |
|
部分图纸 截图 |
  |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
