 |
|


|
设计名称 |
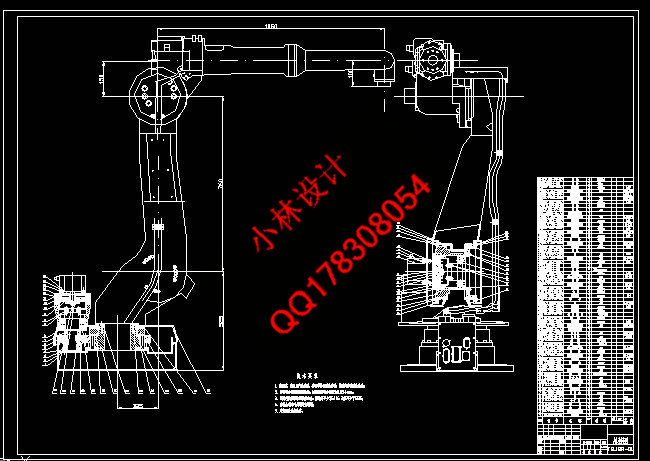
AⅡ-V6L焊接机器人结构设计 |
 |
|
设计编号 |
W758 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
20000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2014.6 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
Word版说明书1份,共45页,20000字
摘 要 3
良程度直接影响着零件或产品的质量。国内焊接机器人应用虽已具有一定规模,但与我国焊接生产总体
需求相差甚远。因此,大力研究并推广焊接机器人技术势在必行。 是在了解焊接机器人在国内外现状的基础上,进而掌握焊接机器人内部结构和工作原理,并对机座和大 臂进行结构设计。合理布置了电机和减速器。同时了解机器人机械系统运动学及运动控制学。为工业上 焊接机器人的设计提供理论参考、设计参考和数据参考,为工业设计者提供设计理论和设计实践的参考
。该机器人具有刚性好,位置精度高、运行平稳的特点。 |
|
部分图纸 截图 |
   |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
