|
文档包括:
说明书一份,共50页,约15000字
CAD版本图纸,共4张
摘要
行走机构是掘进机非常重要的部件之一,行走性能的好坏关键在于其传动系统的计算和设计和履带板的
设计。行走机构一般采用履带型式,两条履带分别由各自的动力来驱动,可实现原地转向。履带的驱动
动力有电动机和液压马达两种,电动机驱动一般只设置一种行走速度,液压马达驱动可采用低速大扭矩
马达直接带动履带链轮,或采用中速液压马达+ 减速器带动履带链轮的传动方式,它可实现无极调速。
履带结构型式有滑动和滚动两种,当机器调动速度≤10m/min 的中、轻型掘进机,宜采用滑动结构型式
;当机器的调动速度>10m/min 的重型、特重型掘进机,应采用滚动结构型式。本文结合了国内外悬臂
式掘进机履带式行走机构的特点,以及EBZ120掘进机的基本参数,对该掘进机行走机构进行了计算,提
出了改进设计建议。
关键字:掘进机;行走机构;传动系统;履带板;计算
目录
引言………………………………………………………………………………1
1 行走机构的参数计算…………………………………………………………3
1.1 行走机构的功用和组成……………………………………………………3
1.2 行走机构基本参数的确定…………………………………………………3
1.2.1 履带板宽度的确定………………………………………………………3
1.2.2 左右履带中心距的确定…………………………………………………3
1.2.3 单侧履带接地长度的确定………………………………………………3
1.2.4 履带平均接地比压的确定………………………………………………3
1.2.5 单侧履带牵引力的确定…………………………………………………3
1.3 履带行走的功率……………………………………………………………4
1.3.1 行走实际功率……………………………………………………………4
1.3.2 单边履带行走机构输入功率的计算确定………………………………4
1.3.3 履带对地面附着力校核计算……………………………………………4
2 驱动元件的选取及参数计算…………………………………………………5
3 行星齿轮传动的特点…………………………………………………………7
4 行星齿轮传动设计……………………………………………………………8
4.1 已知条件……………………………………………………………………8
4.2 选取行星齿轮传动的传动类型和传动简图………………………………8
4.3 配齿计算……………………………………………………………………9
4.4 初步计算齿轮的主要参数…………………………………………………9
4.4.1 齿轮材料和热处理的选择………………………………………………9
4.4.2 齿轮模数的计算…………………………………………………………9
4.5 啮合参数的计算 …………………………………………………………10
4.5.1 变位中心距的计算 ……………………………………………………10
4.5.2 变位系数的计算 ………………………………………………………10
4.6 几何尺寸的计算 …………………………………………………………11
4.6.1 分度圆直径的计算 ……………………………………………………11
4.6.2 齿根圆直径和齿顶圆直径的计算 ……………………………………11
4.6.3 基圆直径的计算 ………………………………………………………13
4.6.4 节圆直径的计算 ………………………………………………………14
4.7 装配条件的验算 …………………………………………………………14
4.7.1 邻接条件 ………………………………………………………………14
4.7.2 同心条件 ………………………………………………………………14
4.7.3 安装条件 ………………………………………………………………14
4.8 传动效率的计算 …………………………………………………………14
4.9 各构件切向力的计算 ……………………………………………………15
4.10 齿轮强度验算……………………………………………………………16
4.10.1 齿面接触强度校核……………………………………………………16
4.10.2 齿根弯曲强度校核……………………………………………………18
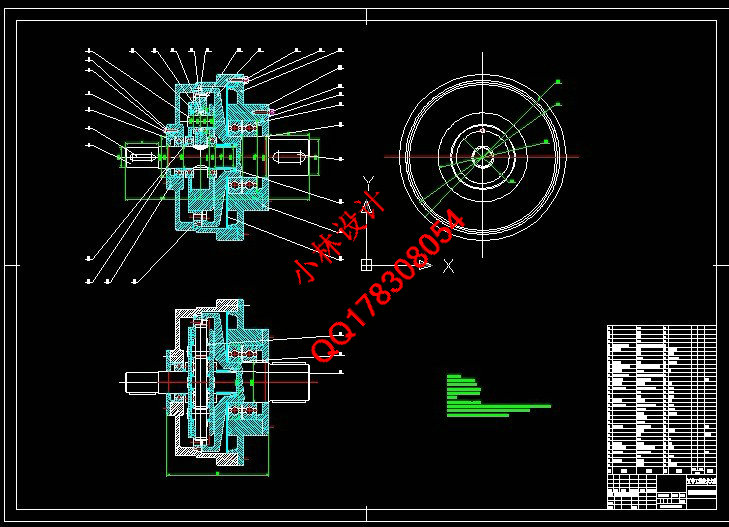
4.11 结构设计…………………………………………………………………21
4.11.1 高速轴的结构设计………………………………………………21
4.11.2 低速轴的结构设计………………………………………………26
4.11.3 行星轮的支承结构………………………………………………32
4.11.4 转臂及其支承结构的设计………………………………………32
5 履带板设计 …………………………………………………………………34
5.1形式的选择…………………………………………………………………34
5.2材料的选择…………………………………………………………………34
5.3形状和尺寸的选择…………………………………………………………34
5.4履带板的应力分析…………………………………………………………35
5.4.1 履带板预张力的分析 …………………………………………………35
5.4.2 履带的应力分析 ………………………………………………………35
5.5链和链轮的参数计算………………………………………………………36
6 实现互换性的设计 …………………………………………………………37
6.1 履带板参数变更设计 ……………………………………………………37
6.1.1 履带板参数计算 ………………………………………………………37
6.1.2 减速器已知条件的变更 ………………………………………………37
6.2 履带板结构变更设计 ……………………………………………………38
7 结论 …………………………………………………………………………39
致谢 ……………………………………………………………………………40
参考文献 ………………………………………………………………………41
附录A …………………………………………………………………………42
附录B …………………………………………………………………………46
|