 |
|


|
设计名称 |
汽车侧向稳定性控制器的设计 |
 |
|
设计编号 |
T858 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
15000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2014.6 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括: 摘 要 基于汽车主动制动侧向稳定系控制系统,使用的是汽车实际横摆角速度与驾驶员期望值的差值来判定 汽车的稳态,同时引入了车辆质心侧偏角与经验值进行比较得到了另个一关于汽车转弯稳定的安全系
数,希望由此改善和提高汽车在转弯过程中的操纵稳定性。 制动内侧后轮,转向严重不足时,同时制动多个车轮;当出现转向过多时,系统将制动外侧车轮,从
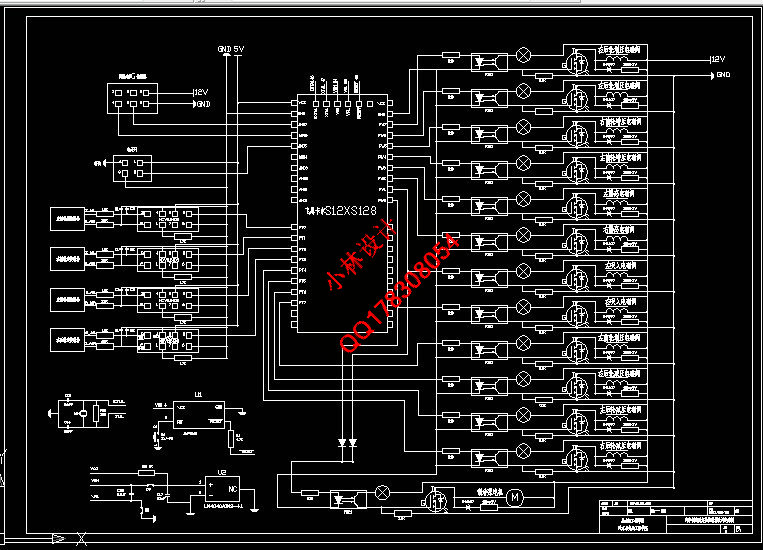
而稳定车辆,保证驾驶员和乘客的安全。 横摆角和G传感仪等信号源,控制部分包括制动增压电机、两个吸入电磁阀、两个隔离电磁阀、四个车 轮的增压和减压电磁阀。通过相关算法,初步确定汽车稳定和各个信号之间的关系,并实现侧向稳定
性的初步控制。 目 录
摘 要 I |
|
部分图纸 截图 |
  |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
