 |
|


|
设计名称 |
智能化自寻迹程控车模外形及其控制系统设计 |
 |
|
设计编号 |
G066 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
23000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括:
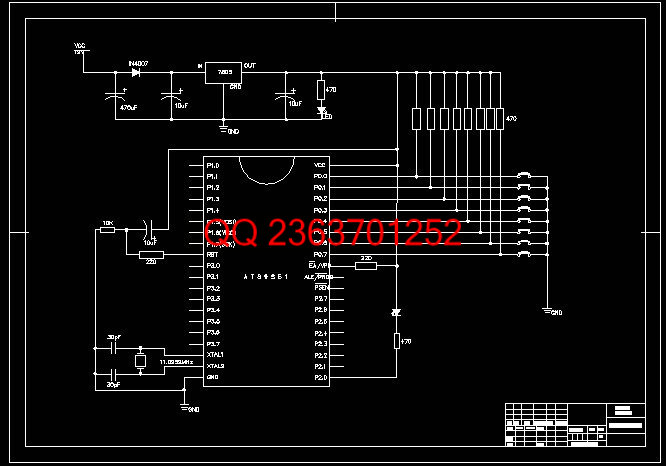
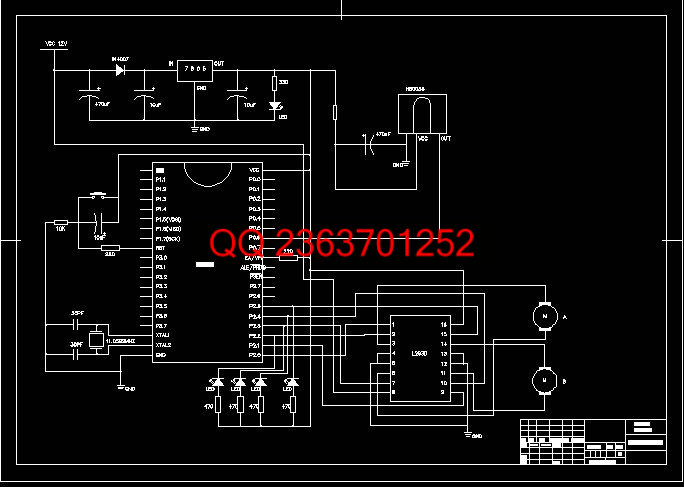
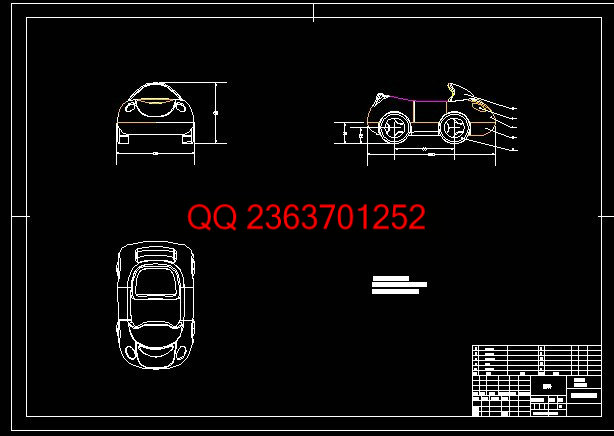
一、 设计(论文)内容 题目:智能化自寻迹程控车模外形及其控制系统设计 研究内容: 1)车体设计 2)控制系统设计 1. 红外遥控装置能控制单片机,使之发出进、退、左转、右转控制(并给出动作指示)。 2. 使用红外对管设计寻迹电路(即自动区别黑白道标记)。 3.根据寻迹信号设计单片机对电机的控制电路。 4.单片机采用汇编及C51进行编制,程序的下载为ISP方式。
二、 要求:
一、 设计(论文)内容 题目:智能化自寻迹程控车模外形及其控制系统设计 研究内容: 1)车体设计 2)控制系统设计 1. 红外遥控装置能控制单片机,使之发出进、退、左转、右转控制(并给出动作指示)。 2. 使用红外对管设计寻迹电路(即自动区别黑白道标记)。 3.根据寻迹信号设计单片机对电机的控制电路。 4.单片机采用汇编及C51进行编制,程序的下载为ISP方式。
二、 要求:
一、 设计(论文)内容 题目:智能化自寻迹程控车模外形及其控制系统设计 研究内容: 1)车体设计 2)控制系统设计 1. 红外遥控装置能控制单片机,使之发出进、退、左转、右转控制(并给出动作指示)。 2. 使用红外对管设计寻迹电路(即自动区别黑白道标记)。 3.根据寻迹信号设计单片机对电机的控制电路。 4.单片机采用汇编及C51进行编制,程序的下载为ISP方式。
二、 要求:
一、 设计(论文)内容 题目:智能化自寻迹程控车模外形及其控制系统设计 研究内容: 1)车体设计 2)控制系统设计 1. 红外遥控装置能控制单片机,使之发出进、退、左转、右转控制(并给出动作指示)。 2. 使用红外对管设计寻迹电路(即自动区别黑白道标记)。 3.根据寻迹信号设计单片机对电机的控制电路。 4.单片机采用汇编及C51进行编制,程序的下载为ISP方式。
二、 要求:
一、 设计(论文)内容 题目:智能化自寻迹程控车模外形及其控制系统设计 研究内容: 1)车体设计 2)控制系统设计 1. 红外遥控装置能控制单片机,使之发出进、退、左转、右转控制(并给出动作指示)。 2. 使用红外对管设计寻迹电路(即自动区别黑白道标记)。 3.根据寻迹信号设计单片机对电机的控制电路。 4.单片机采用汇编及C51进行编制,程序的下载为ISP方式。
二、 要求:
Abstrct:This article introduces the design and execution of auto-searching for track by usage of the reflected infrared sensor on the auto-guided car. The auto-searching for track is on the base of the AGV-auto-guided vehicle system. It makes the car discern the routs, judge and evade the obstacles automatically. So the car can choose the right routes. In the experiment we take use of the guiding wire whose color distinguishes from the background to guide the car and the inflected infrared sensor to discern the guiding wire and obstacles. The AT89S51 Single Chip Microcomputer is used for the control core in this system, and the one-way PWM direct current electromotor for the motive force or power system. This technology could serve to driverless mobile, robot factory, warehouse, service robot and etc.
目录 第三章 单片机介绍..6
第四章 电机驱动及控制..20
第五章 单元电路的设计..27
第六章 操作说明40
红外线接收程序.41 |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持!