 |
|


|
设计名称 |
多关节工业机器人的运动控制设计及仿真-PLC |
 |
|
设计编号 |
H211 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
20000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
Word版说明书1份,共52页,约20000字
CAD版本图纸,共14张
摘要
随着机器人技术的发展,机器人应用领域的不断扩大。工业关节机器人也是工业机器人的一个重要学科。工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。本文简要介绍了关节型机器人机器人的概念,机器人硬件和软件的组成,机器人各个部件的整体尺寸设计,气动技术的特点。本文对机器人进行总体方案设计,确定了机器人的坐标形式和自根据度,确定了机器人的技术参数。同时,设计了机器人的夹持式手部结构,设计了机器人的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机器人的手臂结构。设计出了机器人的气动系统,绘制了机器人气压系统工作原理图,最后完成了本本文设计机器人的三维和二维建模。
关键词:工业机器人关节PLC
目录
目录 1
摘要 2
1绪论 3
1.1本文意义及背景 3
1.2国内外发展现状及趋势 4
2多关节工业机器人的结构设计 6
2.1拟定设计方案 6
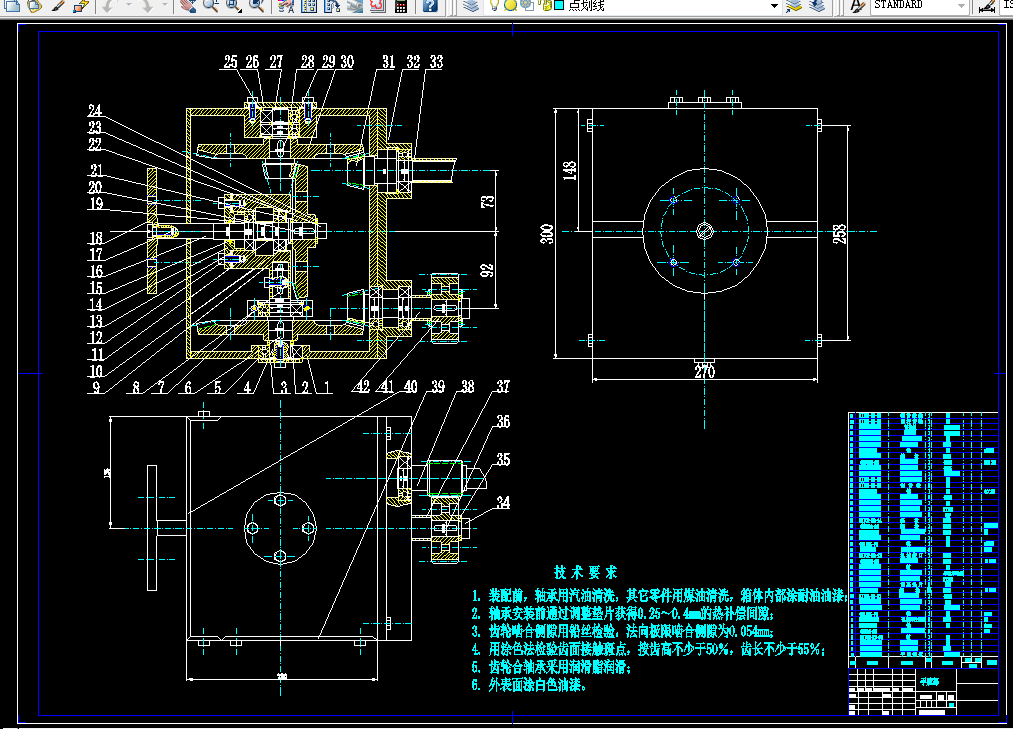
2.2腰部关节的设计 7
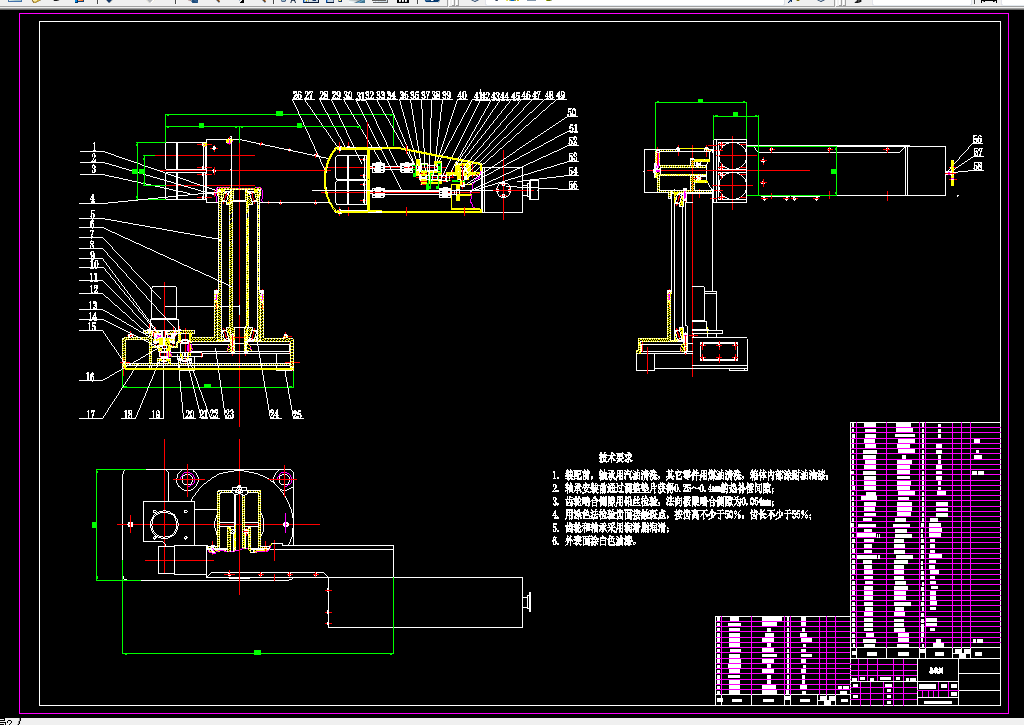
2.3手腕详细设计说明 15
2.4夹持器的设计 24
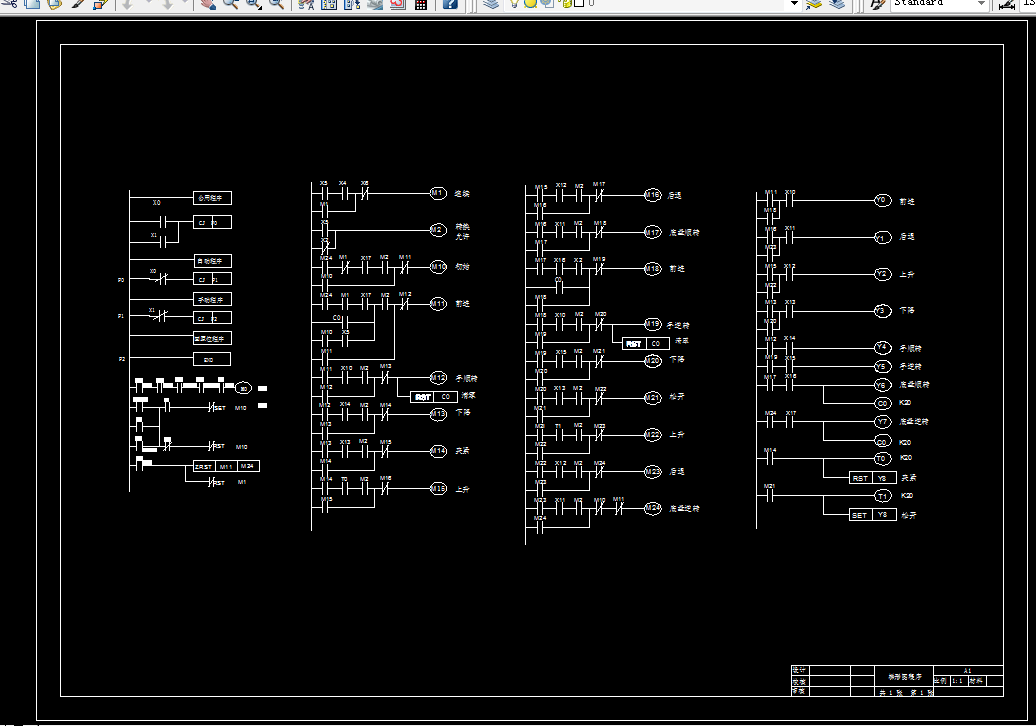
3控制系统设计 25
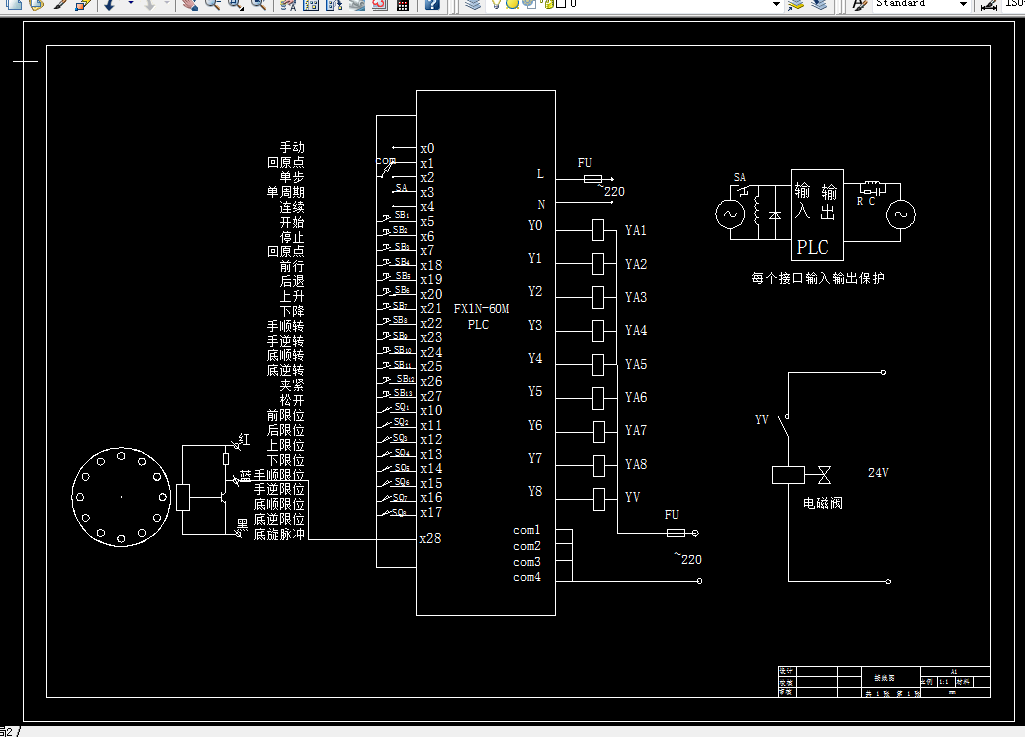
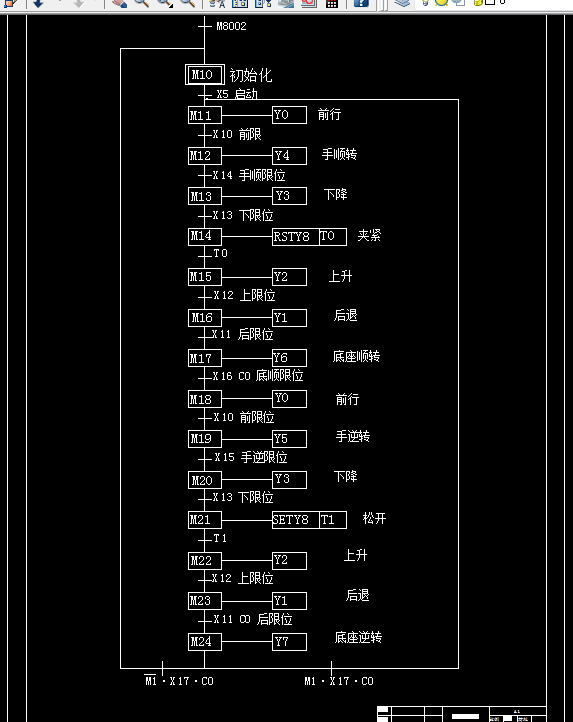
3.1控制系统硬件设计 25
3.2PLC的接口定义 26
4基于ADMAS的运动仿真 28
4.1机器人运动学概述 28
4.2坐标系的变换 29
4.3机器人的正逆运动学 33
4.4在ADMAS中建立模型 38
4.5轨迹规划仿真分析 41
总结 51
参考文献 52
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备