 |
|


|
设计名称 |
辅助人工采摘苹果装置设计 |
 |
|
设计编号 |
H689 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
12000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
Word版说明书1份,共33页,约12000字
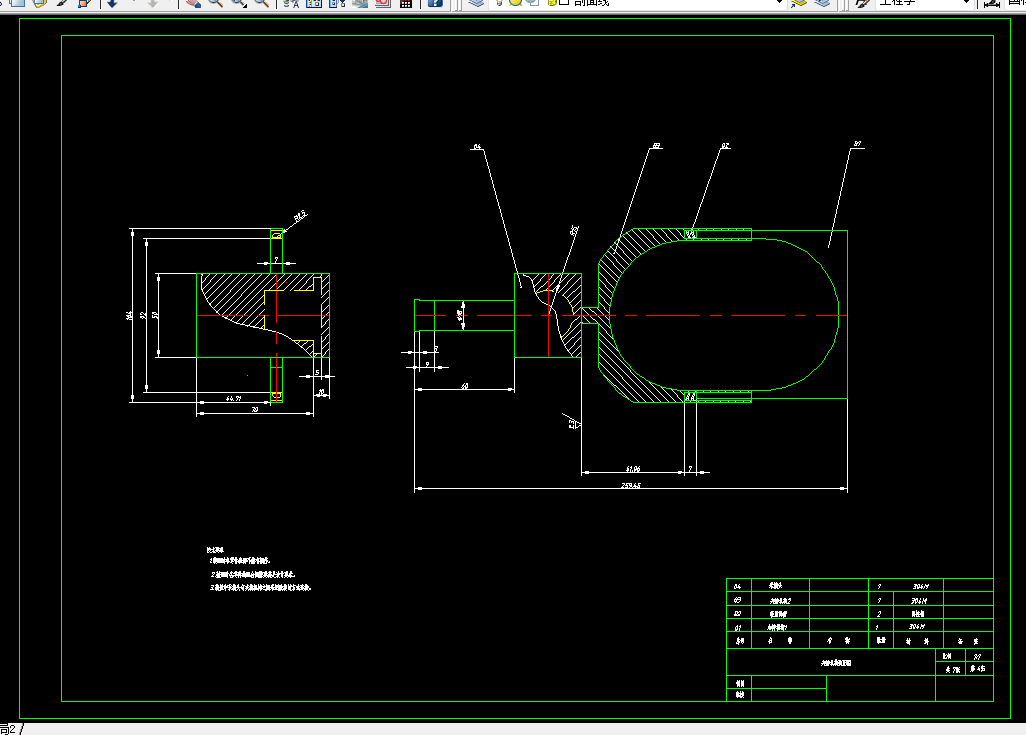
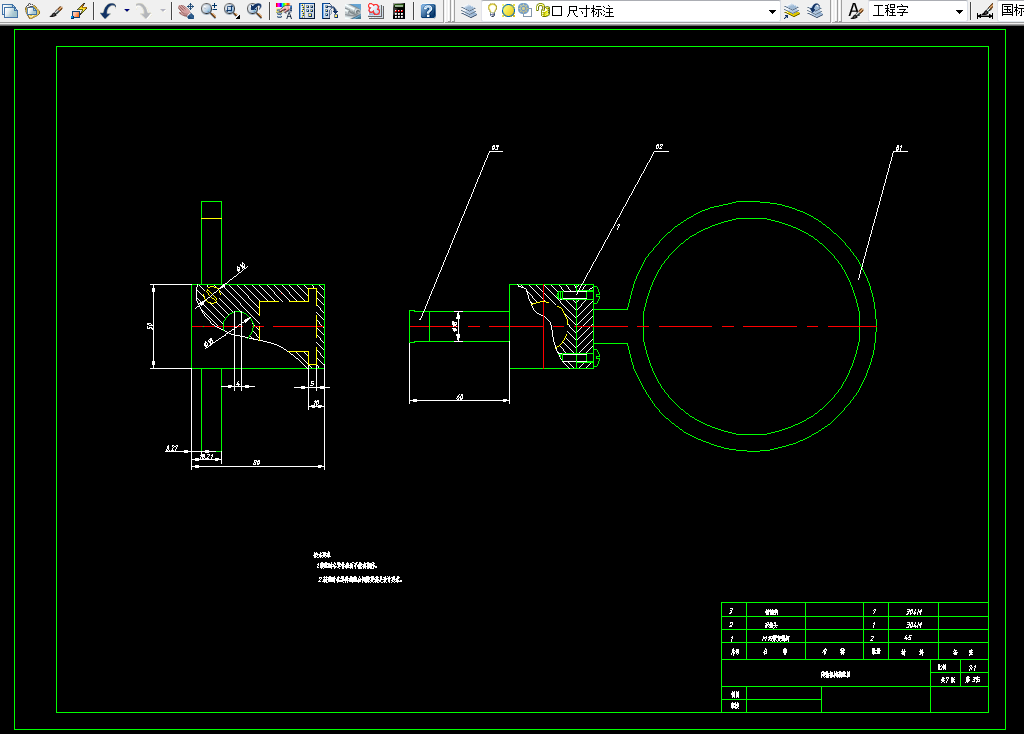
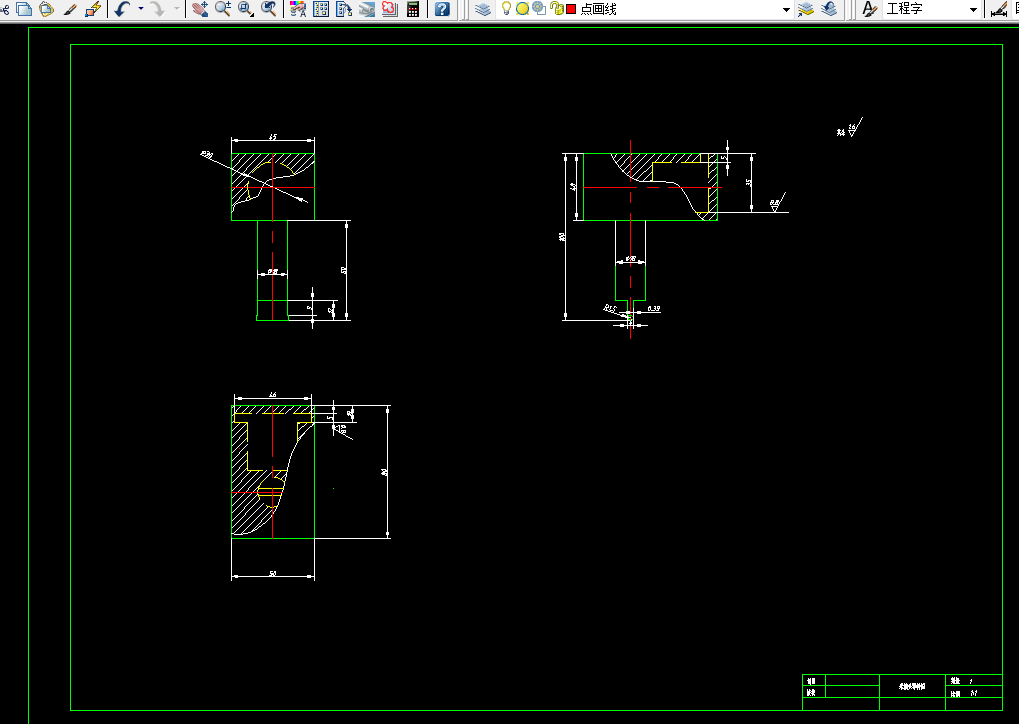
CAD版本图纸,共7张
摘要:目前,世界上各国对于果园收获机器人的研究虽然很多,但由于果园环境复杂,自动导航辨识系统工作时的准确率并不是很高,所以全自动智能化作业采摘苹果设备并没有大规模地应用到实际生产生活中,而农民阶层从古时候到现代一直都属于收入偏低的一群人,他们挣钱的方式就是靠自己纯粹的体力劳动来换取报酬,这也是在我国高度智能化农业机械未能大规模应用的重要原因之一,再加上我国从建国到如今科技飞速发展的时间并不是很长,在农机这方面的投入比重也是从最近几年才开始增加,所以,现阶段内其实是很需要有一种农业机械来代替人力完成繁重的果园劳作,这次的毕业设计课题从某种意义上来说,也是对这个领域的一种探索,而且家里的主要经济来源也是依靠苹果园林,本身也希望未来能够有这么一种机械问世以减轻父母身上的重担,所以这次的毕业设计是很有意义的。
抛开我国的智能化采摘机械设备研究进展程度不说,但就其成本而言,一台成熟的智能采摘设备对于果农而言,它的价格是无法接受的。而市面上常见的一些简易采摘器又无法完全承担起整个采摘任务,减轻果农的劳动强度,希望能够通过本次的毕业设计课题改善这种情况。本次毕业设计的主要内容包括:
首先,从搜集的资料来看,关于辅助人工采摘苹果的研究很少,所以很多地方了参考国内外关于苹果采摘机器人的设计思路,提出本次课题设计研究的基本原则。其次结合果园实际情况,以整个装置中的采摘机构为主进行设计工作,同时对其他各部分机构进行了具体的结构设计,除此之外,还结合果园植株的实际生长情况对装置的各部分零件的参数规格进行了计算,利用所学知识对整个装置的伸缩杆进行稳定性校核,以及对主要零件进行强度校核,确保方案的可行性。然后利用现有的仿真软件Creo 2.0对辅助人工采摘苹果装置进行模拟仿真,做出整个装置的三维效果图,对照实际果园采摘情况进行分析,改进方案,同时利用工程制图软件CAD软件绘出辅助人工采摘苹果装置的装配图及各部分主要零件的零件图,使整个方案设计更加严谨,准确。
关键词:采摘器;伸缩杆;农业机械;模拟仿真;苹果
目录
1 绪论 1
1.1 辅助人工采摘苹果装置的研究背景 1
1.2 国内外研究现状及发展趋势 1
1.2.1 国外研究成果现状: 1
1.2.2国内研究现状: 2
1.3 辅助人工采摘苹果装置研究的目的和意义 3
1.4 研究内容和方法 3
2 辅助人工采摘苹果装置研究方案设计 4
2.1 苹果生长特性环境及果园实际种植现状 4
2.2 辅助人工采摘苹果装置总体设计 4
2.2.1 辅助人工采摘苹果装置整机机构方案设计 5
2.2.2 辅助人工采摘苹果装置工作过程简介 5
3 辅助人工采摘苹果装置采摘执行机构的设计 7
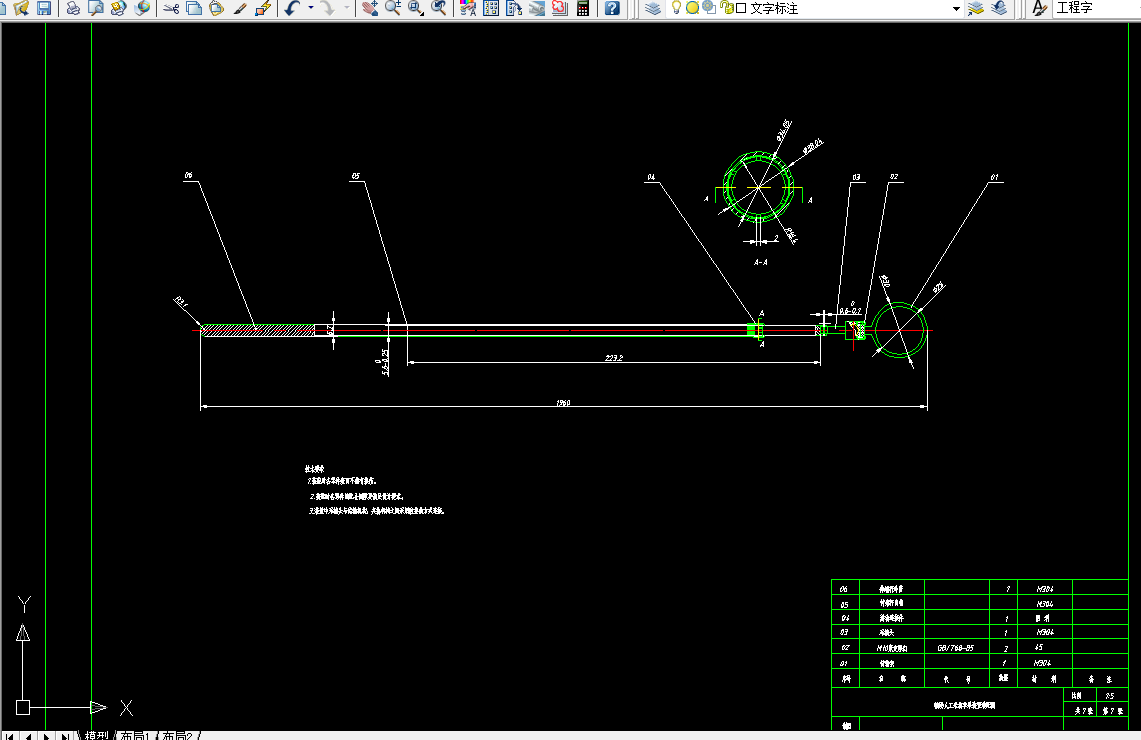
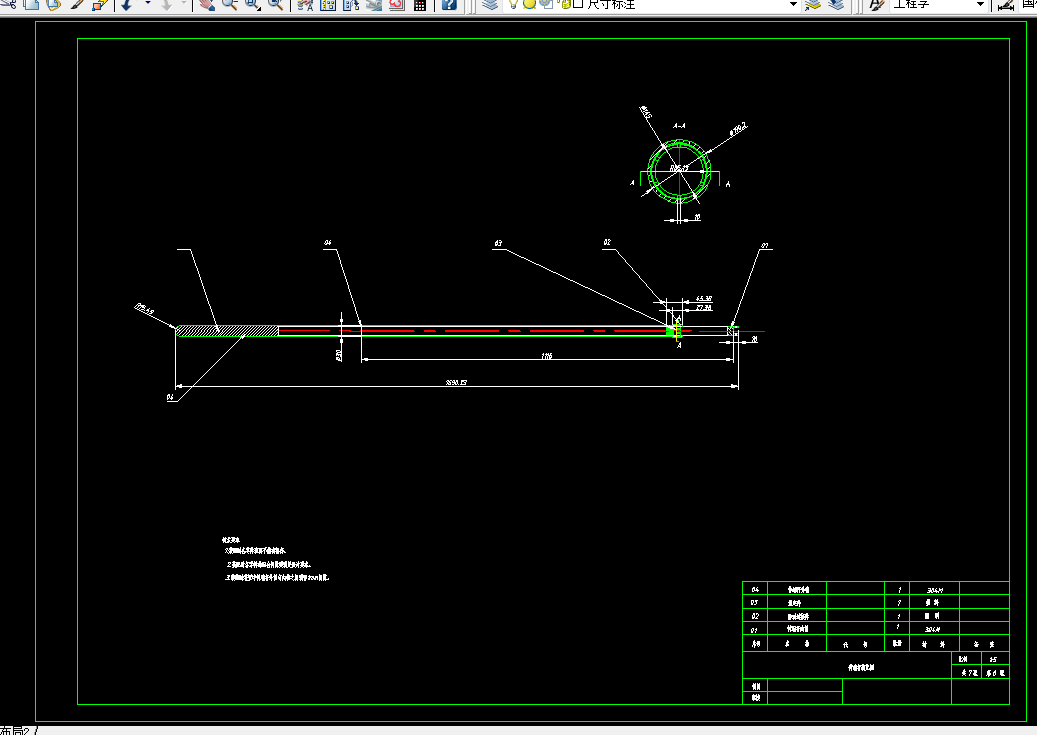
3.1 伸缩杆设计 7
3.1.1 伸缩杆结构设计 7
3.1.2伸缩杆设计计算及校核 8
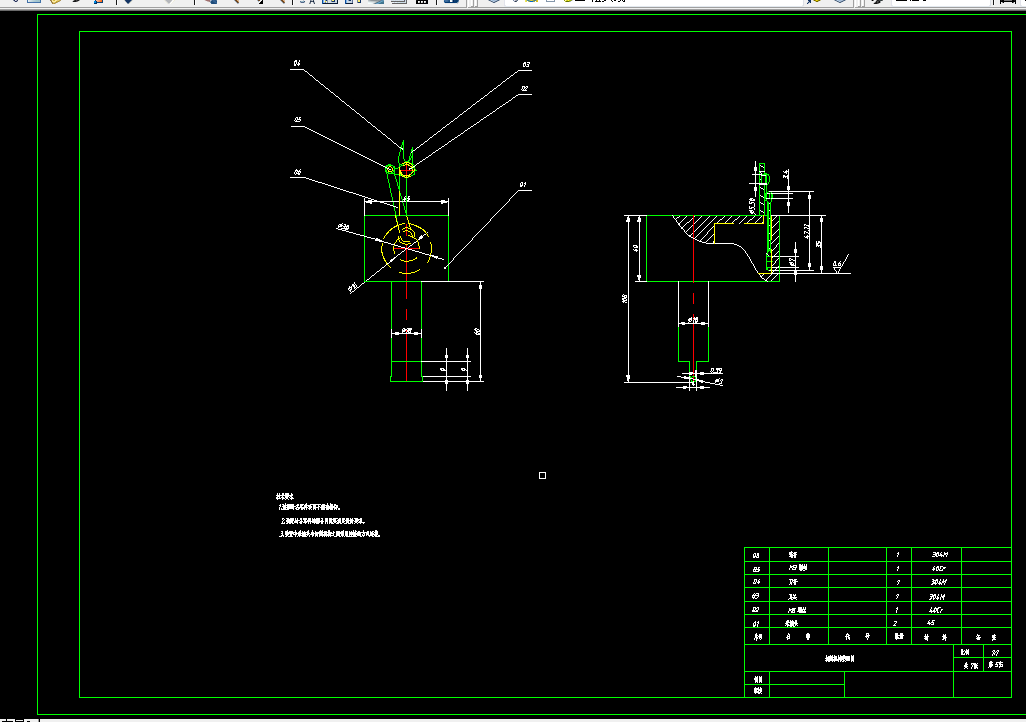
3.2 采摘头连接装置设计 10
3.3 采摘头设计 10
3.3.1 夹持机构 10
3.3.2 切割机构 11
3.3.3 传动控制 13
4 果实安全传输装置的结构设计 14
5 辅助人工采摘苹果装置运输机构的选择 16
6 采摘机构受力分析及弯曲切应力强度校核 17
7 部位仿真模拟分析 20
7.1软件介绍 20
7.2绘制零件图 20
总结 25
参考文献 26
致 谢 27
附录 30
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备