 |
|


|
设计名称 |
一种采用DELTA并联机构的3D打印机结构设计【含SW三维】 |
 |
|
设计编号 |
H787 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
16000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
Word版说明书1份,共47页,约16000字
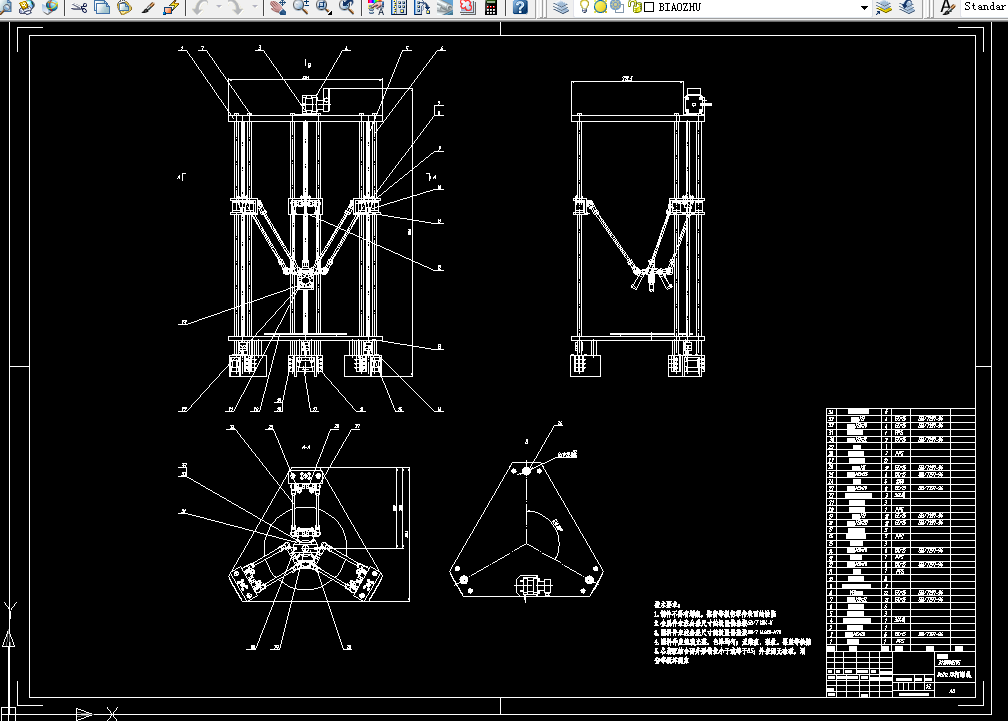
CAD版本图纸,共5张
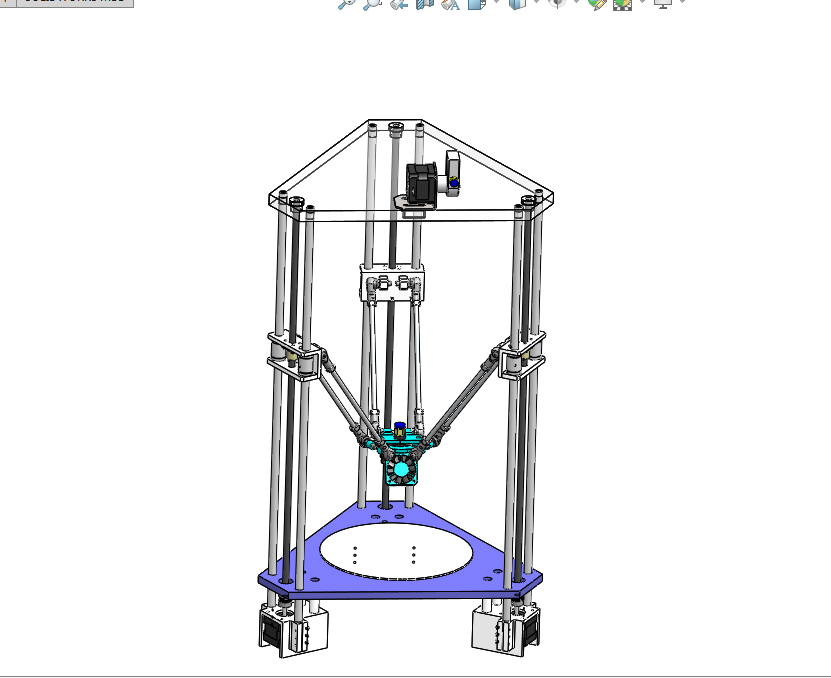
SW三维图一份
摘 要
三维打印技术是集机械、自动控制、计算机科学、材料学等为一体的先进制造技术。本文首先介绍了三维打印技术的基本原理和特点,以及三维打印技术的发展现状和关键技术。接着阐述并联机器人的机构原理和特点,还有它的发展国内外发展情况。然后通过选题背景及设计目的引出如今三维打印机存在的问题,比如成型精度和速度等。
本文是对并联机械手式三维打印的整体结构设计。着重于机械手的机构的设计,简单性地说明打印机的整体设计。
在机械手的机构设计部分,需要建立运动学模型。对于机器人的控制系统来说,运动学正解和运动学反解都是不可避免的。还有一个重要点是并联机器人的尺度综合。尺度综合是并联机械手设计的重要内容,速度、精度、刚度、工作空间是评价并联机械手系统性能的重要指标。
机械手的机构设计完成后,因为是基于并联机械手的三维打印机,还需要讨论三维打印机的整体设计,这也是为了能将并联机械手和三维打印机很好地结合为一体。对于部分结构,本文会予以重点讨论。
关键词:三维打印技术,并联机械手,运动学模型,尺度综合
目 录
1 绪论 1
1.1 三维打印机概述 1
1.1.1 三维打印机的概述 1
1.1.2 应用前景 1
1.1.3 存在的问题 2
1.2 并联机械手综述 4
1.2.1 并联机构的特点 5
1.2.2 并联机构的分类 6
1.2.3 并联机器人的应用 10
1.2.4 发展展望 11
1.3 选题背景及设计目的 12
1.4 研究内容 13
2 打印机主传动结构的设计 14
2.1 设计前分析 14
2.2 Delta机器人结构分析 14
2.3 打印机传动形式的确定 16
2.4 动平台位置反解 18
2.5 机械手的工作空间 19
2.6 Delta 3D打印机基本参数的确定 20
2.7 移动平台配件的选择及其固定结构的设计 20
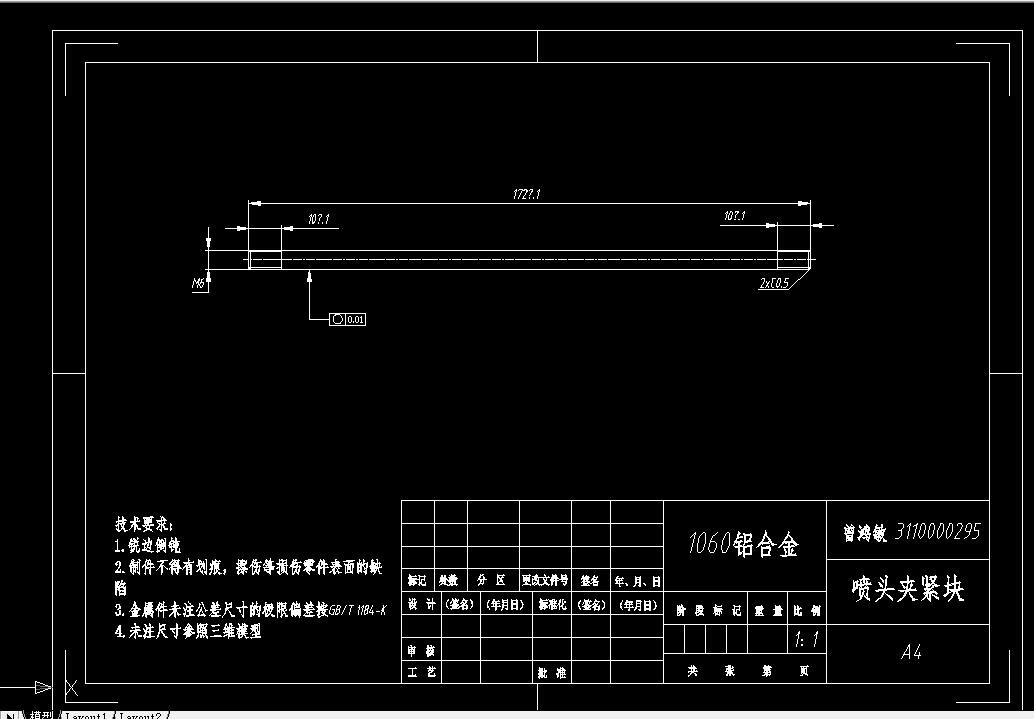
2.7.1 喷嘴的选择及其夹紧结构的设计 21
2.7.2 散热器的选择及其固定钣金的设计 22
2.7.3关节轴承的选取 23
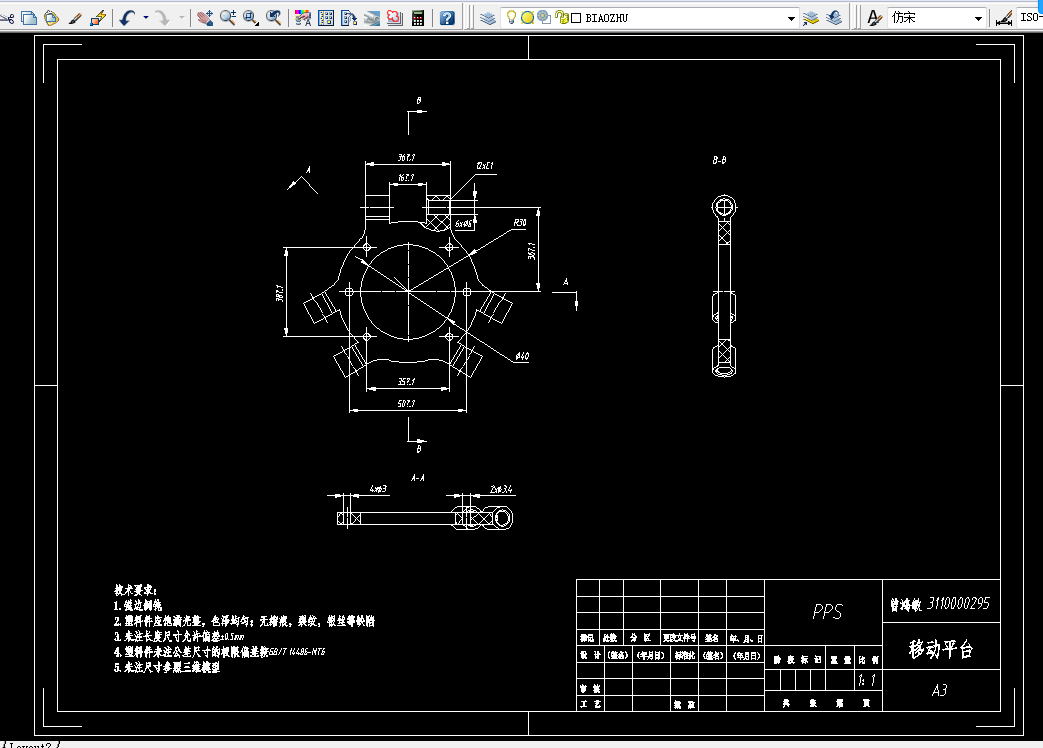
2.7.4移动平台的设计 24
2.8从动臂的设计 27
2.9 传动机构配件的选择及其固定结构的设计 28
2.9.1传动形式的设计 28
2.9.2 丝杆的选择 28
2.9.3 支撑与导向机构的设计 29
2.9.4电机选型 30
2.9.5 滚珠丝杆螺母与直线轴承夹紧结构的设计 31
2.9.6扭力校验 31
2.9.7 电机固定架的结构设计 33
3 打印机其它部件的设计 34
3.1 远程送料机构的选取与固定 34
3.2 上平台的结构设计 34
3.3 下平台及打印平台的结构设计 35
3.4 料架设计 35
结 论 36
参考文献 37
致 谢 38
附录A 产品效果图 39
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备