 |
|


|
设计名称 |
自动爬楼搬运小车设计-爬楼梯机器人【含三维图】 |
 |
|
设计编号 |
H840 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
7100字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
Word版说明书1份,共22页,约7100字
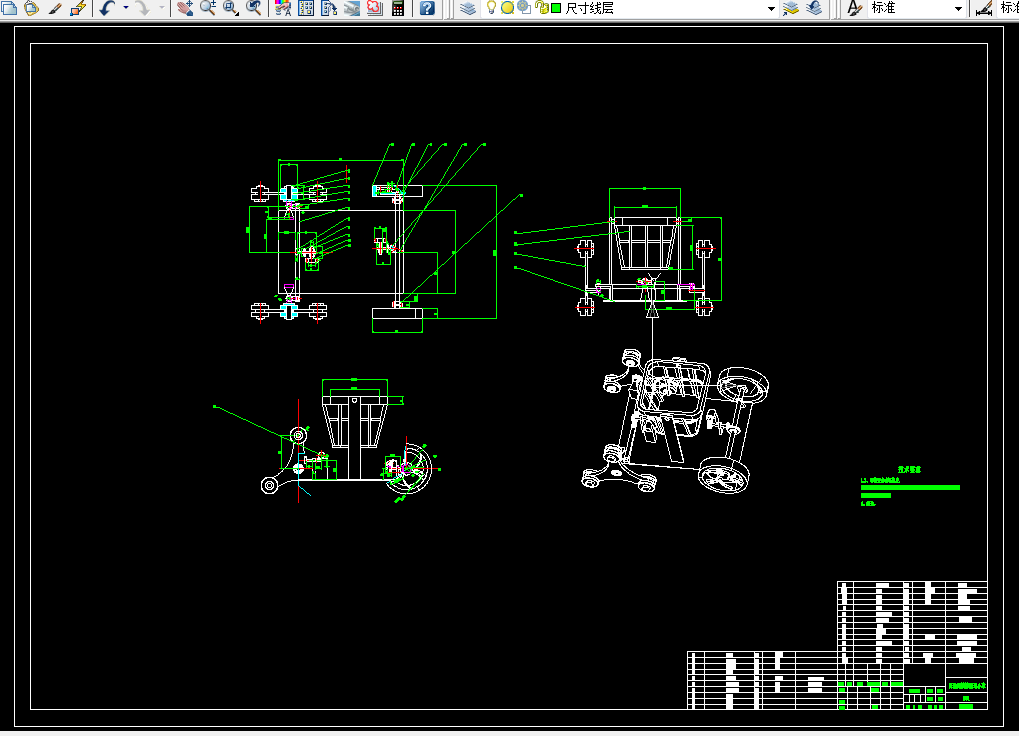
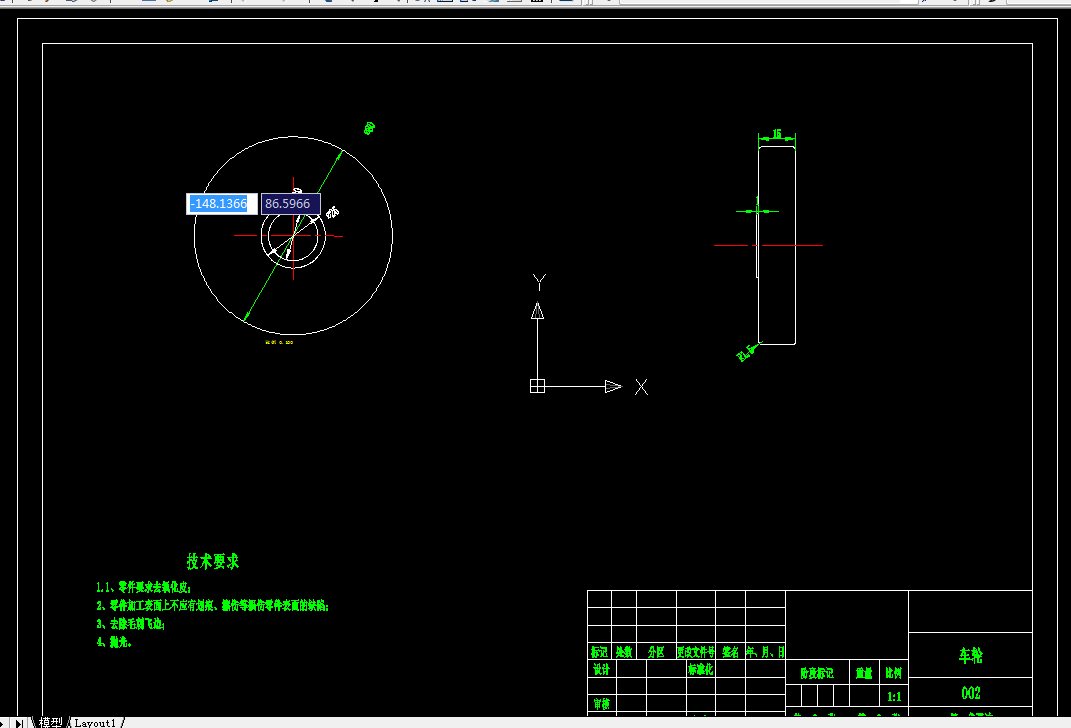
CAD版本图纸,共6张
UG三维图一份
摘 要
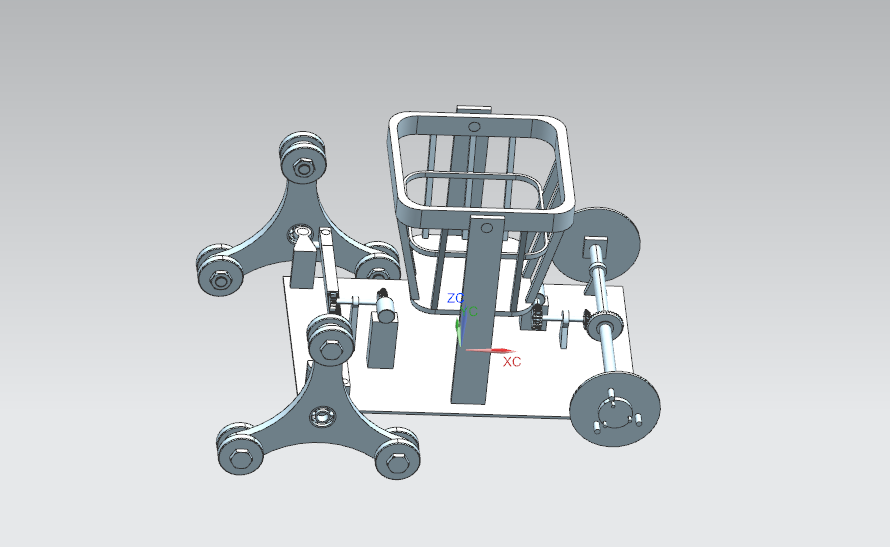
在日常生活和生产中经常会有大量的楼梯,基本是由人力来处理传统的方法,老人爬楼梯和原来一样,现在又想搬重物,所以这个话题设计了一辆自动爬楼梯的货车。本文首先介绍了爬楼梯机器人的研究现状及目前需要解决的问题。根据研究的目的和主要内容,从两个方面对汽车进行了设计。首先,电车必须满足爬楼梯的要求。我们选择前轮为变形轮移动小车,后轮主要用于行星轮的旋转。与此同时,我们需要很大的力量来爬楼梯。我们还选择了高功率电动机通过蜗轮和蜗杆为汽车提供动力。此外,我们调整了车的篮子,以便当汽车爬上楼梯时,货物总是在水平面上。第二,我们需要做的汽车电路设计,我们使用单片机控制器,在汽车前面有四个超声波测距仪当小车的楼梯,首先控制变形轮和电机驱动轴旋转汽车上楼梯,汽车转向角,与此同时,车篮子里始终保持水平。
关键词:变形轮 行星轮 重心调整 单片机
?
目录
摘 要 i
Abstract ii
1 绪论 1
1.1自动爬楼搬运小车的研究目的和意义 1
1.2 自动爬楼梯搬运小车国内外研究现状 1
1.3 课题研究的主要内容 3
2 自动爬楼梯搬运小车的总体方案设计 4
2.1 爬楼机器人的设计要求 4
2.2 自动爬楼梯小车方案比较 4
2.2.1 足式 4
2.2.2 履带式 5
2.2.3 轮组式 5
3 爬楼梯机器人的机械结构设计 7
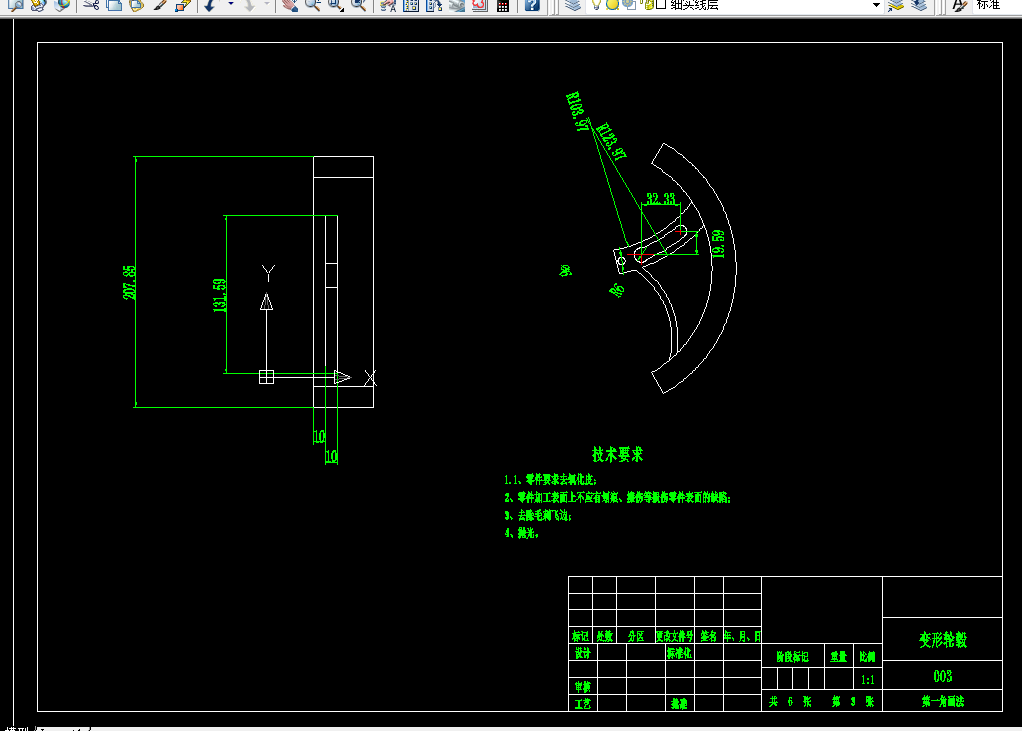
3.1 变形轮的设计 7
3.1.1 变形轮的确定 7
3.1.2 自由度计算 8
3.1.3 机械原理分析 8
3.1.4 尺寸确定 8
3.2 转向机构的设计 9
3.3 驱动结构设计 10
3.3.1蜗轮蜗杆减速系统 10
3.4 后轮轮组设计 10
3.5 重心调节机构的设计 12
4 爬楼梯机器人控制系统的设计 14
4.1 阶梯攀爬服务机器人控制原理 14
4.2超声波测距电路设计 14
4.3驱动电路设计 15
5总结 17
致 谢 18
参考文献 19
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备