 |
|


|
设计名称 |
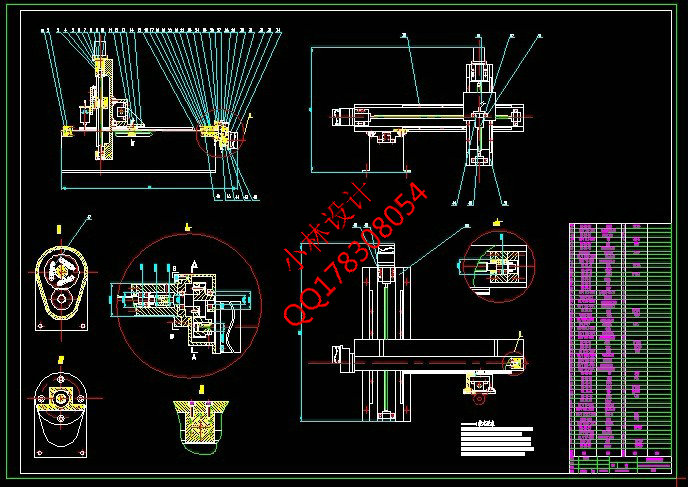
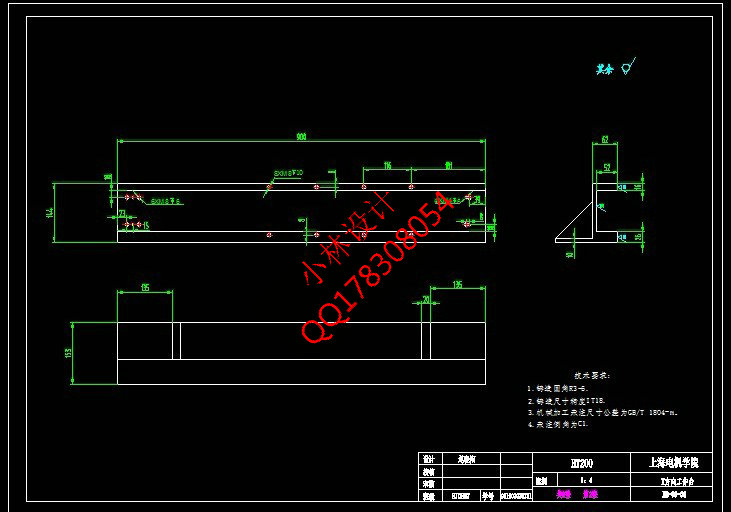
点胶机设计--悬臂式结构设计 |
 |
|
设计编号 |
S215 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
15000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2017.3.14 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
word说明书一份,共39页,约15000字
任务书一份
开题报告一份
外文翻译一份
CAD版本图纸,共8张
摘 要
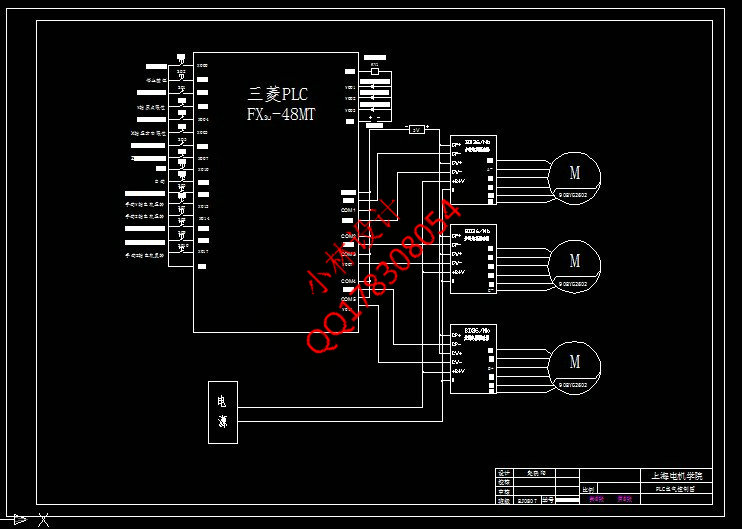
本设计为点胶机设计—悬臂式结构,末端执行器是一个固定在Z轴上的点胶头, X、Y、Z三个方向上都是由步进电机带动滚珠丝杠,将电机轴的旋转运动转化成工作平台的直线运动,实现了点胶机在规定工作范围内各个点的点胶、涂胶工作。在PLC控制下,该结构能按照程序自动在相应的点完成点胶、在一段距离内完成涂胶工作,也可由手动控制到达工作范围内的各个点以及完成回零工作。选用的步进电机用电脉冲信号进行控制,将电脉冲信号的个数和频率分别转化成为末端执行器的位移和移动速度。
关键词:点胶机、悬臂式、步进电机、滚珠丝杠、PLC
ABSTRACT
This design for glue machine design-the cantilevered structure, end actuator is a fixed in the Z axis at a point on the rubber head, X, Y, Z three direction is by stepping motor drive the ball screw, will the motor shaft rotation movement into working platform linear motion, realize a little gum machine in the provisions within the scope of work of various points point glue, glue work. In the PLC control, this structure can be in accordance with the procedures in the corresponding points finish glue, in a distance work to finish glue, can also be made by manual control to work within the scope of the various points, and complete back to zero. The selection of stepping motor power pulse signal control, the electrical impulses of the number and frequency signal into a respectively at the end of the implementation of the displacement and speed.
Key words: Glue machine, cantilevered, step motor, the ball screw, PLC
目 录
1绪论----------------------------------------------------------------------------------------------------------1
1.1 国外研究现状及发展趋势-----------------------------------------------------------------1
1.2 国内研究现状及发展趋势-----------------------------------------------------------------1
2设计方案--------------------------------------------------------------------------------------------------3
2.1 机械部分-----------------------------------------------------------------------------------------3
2.2 电气部分-----------------------------------------------------------------------------------------3
2.3 控制部分-----------------------------------------------------------------------------------------3
2.4 传动部分-----------------------------------------------------------------------------------------4
3 计算说明-------------------------------------------------------------------------------------------------5
3.1 Z轴(上下)方向传动部件的选型与校核------------------------------------------5
3.2 X轴(左右)方向传动部件的选型与校核-----------------------------------------11
3.3 Y轴(前后)方向传动部件的选型与校核-----------------------------------------19
4电气控制部分----------------------------------------------------------------------------------------28
4.1控制要求-----------------------------------------------------------------------------------------28
4.2设计方案-----------------------------------------------------------------------------------------28
4.3 PLC简介-----------------------------------------------------------------------------------------28
4.4 驱动器的选用---------------------------------------------------------------------------------29
5结论--------------------------------------------------------------------------------------------------------30
附录Ⅰ 电气控制图----------------------------------------------------------------------------------31
附录Ⅱ PLC控制流程图----------------------------------------------------------------------------32
附录Ⅲ PLC控制程序图----------------------------------------------------------------------------33
参考文献---------------------------------------------------------------------------------------------------35
致谢-----------------------------------------------------------------------------------------------------------36
|
|
部分图纸 截图 |
   |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备