 |
|


|
设计名称 |
载人三自由度三角形机器人的设计与研究【含SW三维图】 |
 |
|
设计编号 |
A536 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
18000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共42页,约18000字左右
CAD版本本图纸,共10张
SW三维图一份
摘 要
机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。
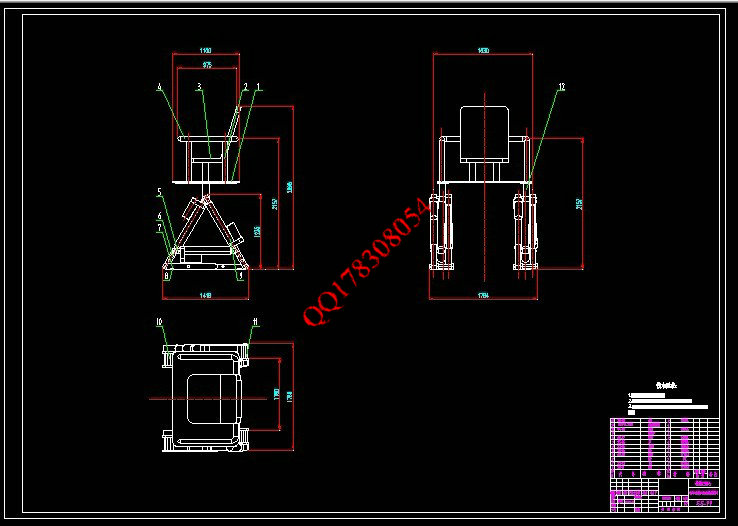
本文主要以电动推杆作为主要执行元件来设计载人三自由度三角形机器人的整体方案。该机构采用统一动作、协调控制的原则,通过推杆的行程的打开来实现机器人脚的运动,通过中控系统的控制来实现载人三自由度三角形机器人的动作,由于是中控系统控制,所以控制灵活,多样。人可以坐在机器人上面,通过控制器来控制机器人的动作,实现一些人类靠自己脚力无法完成的功能。
关键词:机器人;工作;控制;三自由度三角形机器人
目 录
摘 要 i
ABSTRACT ii
目 录 iii
1 绪论 1
1.1 机器人简史 3
1.2 应用机器人的意义 6
1.3 本课题研究的内容 9
2 载人三自由度三角形机器人总体方案结构的设计 12
2.1 载人三自由度三角形机器人的总体方案图 12
2.2 载人三自由度三角形机器人的工作原理 12
3 机械结构的设计 13
3.1电动推杆的定义 14
3.2电动推杆的主要结构 15
3.3电动推杆的设计计算 16
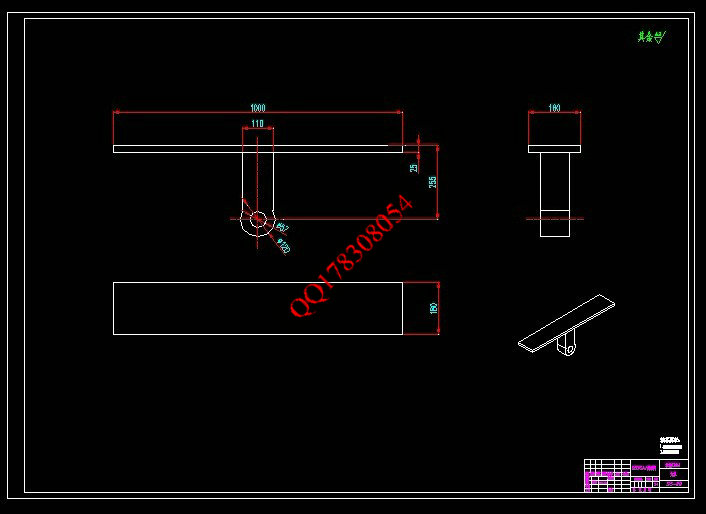
3.4 连接轴的设计 17
4 各主要零部件强度的校核 18
4.1 连接轴轻度的校核 19
4.2 底板强度的校核 19
5 载人三自由度三角形机器人的三维建模 20
5.1 电动推杆的三维建模 23
5.2 支板的三维建模 24
5.3 安全栏的三维建模 25
5.4 载人三自由度三角形机器人的三维建模 25
6 三维软件设计总结 26
结论 28
致 谢 29
参考文献 38
附录 一 32
附录 二 42
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备