 |
|


|
设计名称 |
基于PLC三自由度机械手控制系统的设计【含SW三维图】 |
 |
|
设计编号 |
A688 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
16000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共52页,约16000字左右
CAD版本本图纸,共11张
SW三维图一份
基与PLC三自由度机械手控制系统的设计与实现
目录.......................................................................................................................1
文摘.......................................................................................................................3
Abstract..................................................................................................................3
第一章 绪论.......................................................................................................4
1.1机械手概述...............................................................................................4
1.2机械手的组成和分类...............................................................................4
1.2.1机械手的组成................................................................................5
1.2.2机械手的分类……………………………………………..........6
1.3国内外发展状况.. ...............................................................................................7
1.4课题的提出及主要任务………………………………………………..8
1.4.1课题的提出……………………………………………..............8
1.4.2课题的主要任务……………………………………………......9
第二章 机械手的设计方案…………………………………………….............9
2.1机械手的座标型式与自由度……………………………………….....10
2.2机械手的手部结构方案设计……………………………………….....11
2.3机械手的手腕结构方案设计……………………………………….....13
2.4机械手的手臂结构方案设计……………………………………….....14
2.5机械手的驱动方案设计…………………………………………….....15
2.6机械手的控制方案设计…………………………………………….....17
2.7机械手的主要参数………………………………………………….....18
2.8机械手的技术参数列表…………………………………………….....19
第三章 手部结构设计……………………………………………....................20
3.1夹持式手部结构…………………………………………………….....21
3.1.1手指的形状和分类………………………………………….....22
3.1.2设计时考虑的几个问题…………………………………….....23
3.1.3手部夹紧气缸的设计……………………………………….....24
第四章 手腕结构设计…………………………………………………............26
4.1手腕的自由度………………………………………………………....28
4.2手腕的驱动力矩的计算……………………………………………....29
4.2.1手腕转动时所需的驱动力矩…………………………………..29
4.2.2回转气缸的驱动力矩计算……………………………………..30
4.2.3回转气缸的驱动力矩计算校核………………………..............33
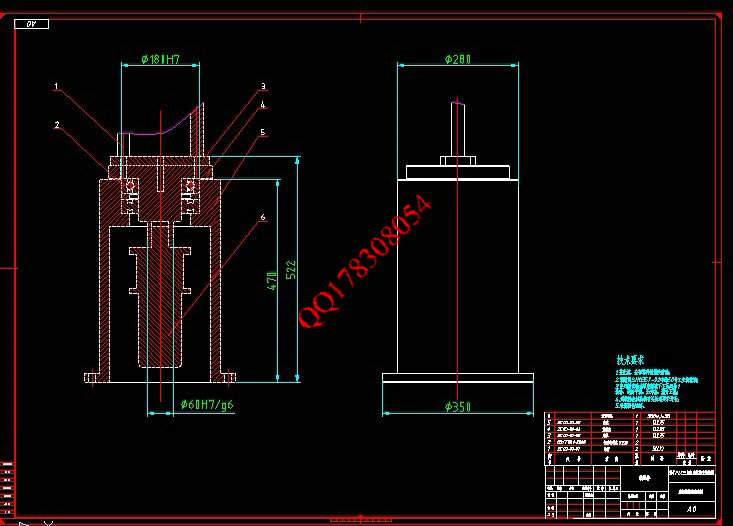
第五章 手臂伸缩,升降,回转气缸的设计与校核………………………......33
5.1手臂伸缩部分尺寸设计与校核…………………………………….....34
5.1.1尺寸设计……………………………………………...................35
5.1.2尺寸校核……………………………………………...................35
5 .1 .3导向装置……………………………………………...................36
5 .1 .4平衡装置……………………………………………..................37
5.2手臂升降部分尺寸设计与校核………………………………..................37
5.2.1尺寸设计……………………………………………..................37
5.2.2尺寸校核……………………………………………..................37
5.3手臂回转部分尺寸设计与校核……………………………………..........38
5.3.1尺寸设计……………………………………………..................39
5.3.2尺寸校核……………………………………………..................40
第六章 气动系统设计…………………………………………….......................41
6.1气压传动系统工作原理图…………………………………………........42
6.2气压传动系统工作原理图的参数化绘制…………………………........43
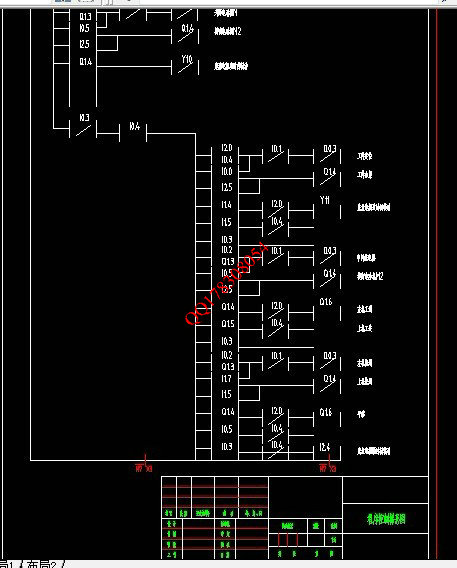
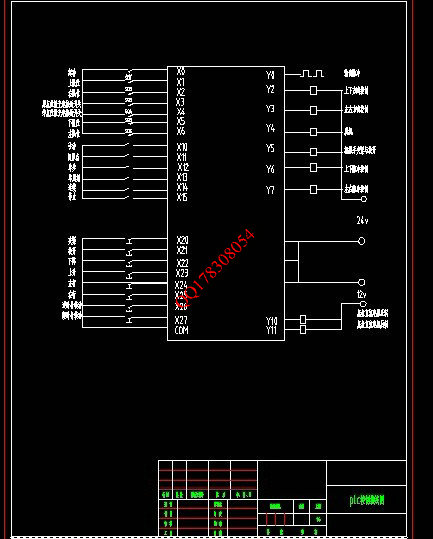
第七章 机械手的PLC控制设计…………………………………………….......44
7.1可编程序控制器的选择及工作过程………………………………........45
7.1.1可编程序控制器的选择………………………………………..46
7.1.2可编程序控制器的工作过程…………………………………..47
7.2可编程序控制器的使用步骤………………………………………........48
7.3机械手可编程序控制器控制方案…………………………………........49
结论………………………………………………………………….....................50
致谢…………………………………………………………………………….....51
参考文献………………………………………………………………………….52
|
|
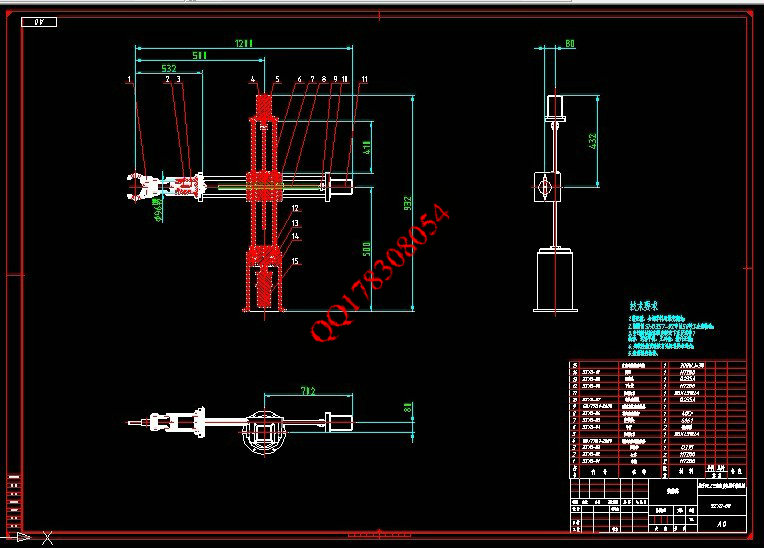
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备