 |
|


|
设计名称 |
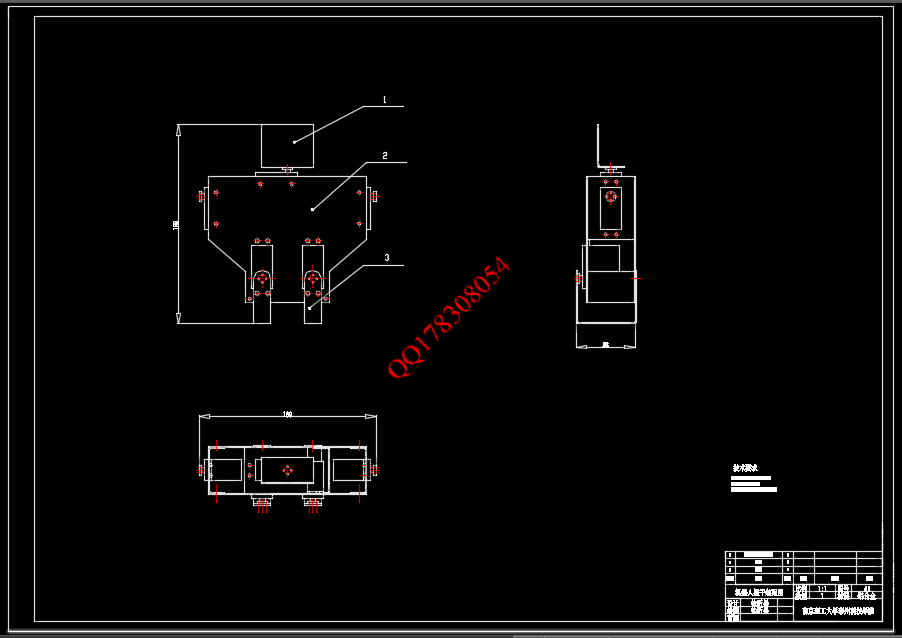
两足行走机器人行走结构部分设计【含Proe三维图】 |
 |
|
设计编号 |
A843 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
10000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共24页,约10000字左右
CAD版本本图纸,共16张
中文摘要
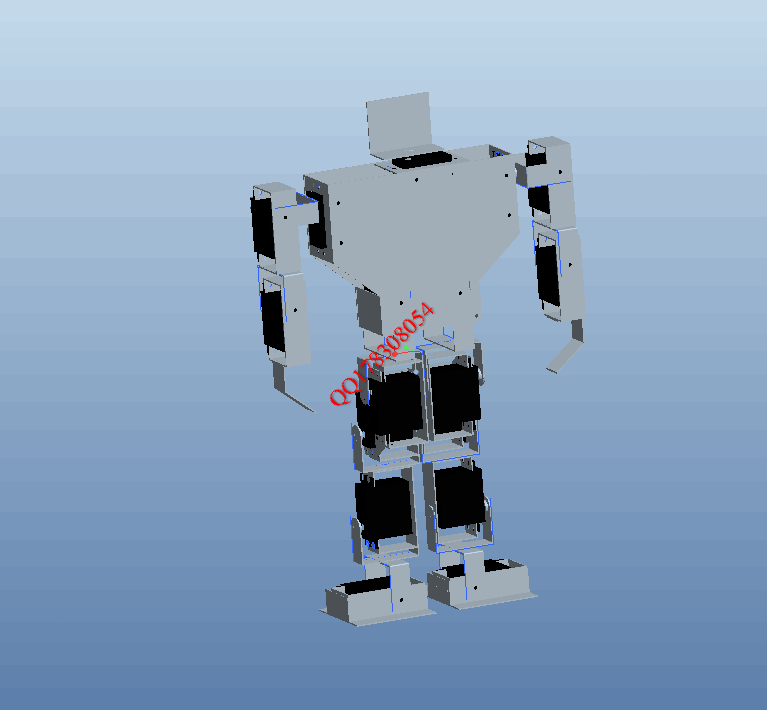
20世纪40年代,伴随着遥控操纵器和数控制造技术的出现,关于机器人技术的研究开始出现。经过几十年的发展,数百种不同结构、不同控制系统、不同用途的机器人已进入了实用化阶段。目前,机器人大多以轮子的形式实现行走功能阶段。真正模仿人类用腿走路的机器人还不多,虽有一些六足、四足机器人涌现,但是两足机器人还是凤毛麟角。本课题主要针对两足机器人的行走进行研究、分析、设计,然后材料加工制作,最后进行组装和行走调试。
目 录
1 绪论 1
1.1 引言 1
1.2 机器人的发展及技术 1
1.3 两足机器人的优点及国内外研究概况 2
1.4 本课题的主要工作 7
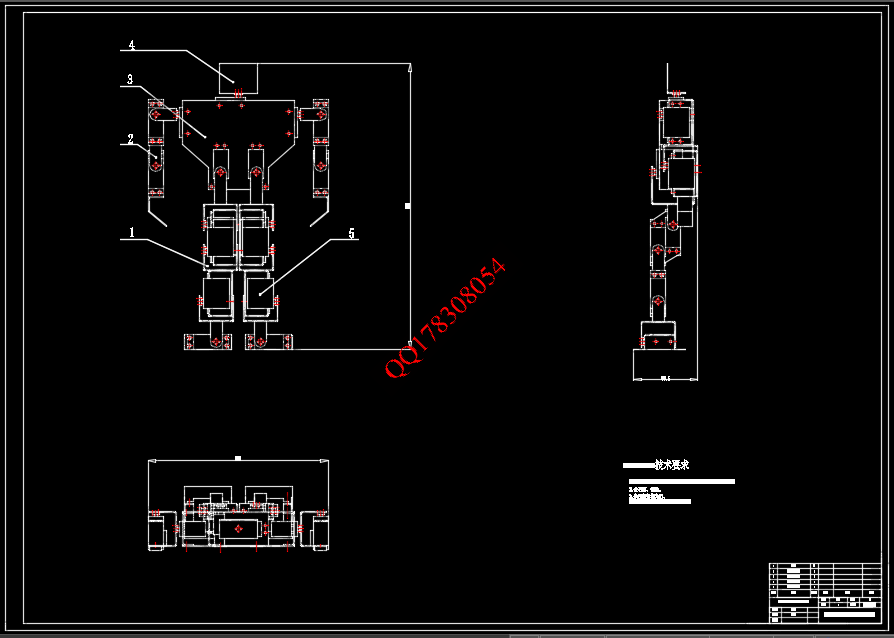
2 双足机器人本体结构设计分析 8
2.1 引言 8
2.2 两足机器人的结构分析 8
2.3 机器人设计思路 9
2.4 机器人设计方案 10
2.5 驱动方式的选择 12
3 双足机器人的具体制作 13
3.1 双足机器人的材料选择 13
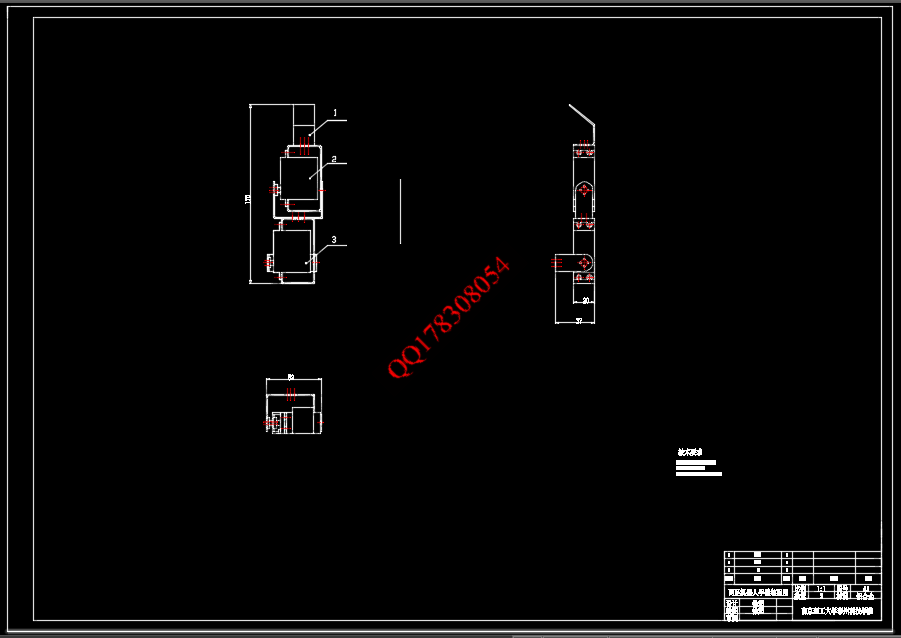
3.2 双足机器人的零件加工 13
3.3 两足机器人的组装 16
3.4 两足机器人相关数据 19
3.5 两足机器人总体尺寸 19
3.6 舵机具体参数 19
4 课题总结 20
结束语 21
致谢 22
参考文献 23
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备