 |
|


|
设计名称 |
集装箱波纹板焊接机器人机构运动学分析及车体结构 |
 |
|
设计编号 |
A858 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
12000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共33页,约12000字左右
CAD版本本图纸,共12张
摘要
随着工业水平的发展,重要的大型焊接结构件的应用越来越多,其中大量的焊接工作必须在现场作业,如集装箱波纹板焊接机器人、大型舰船舱体、甲板的焊接、大型球罐(储罐)的焊接等。而这些焊接场合下,焊接机器人要适应焊缝的变化,才能做到提高焊接自动化的水平。无疑,将机器人技术和焊缝跟踪技术结合将有效地解决大型结构件野外作业的自动化焊接难题。因此机器人的设计对于解决这一难题至关重要。
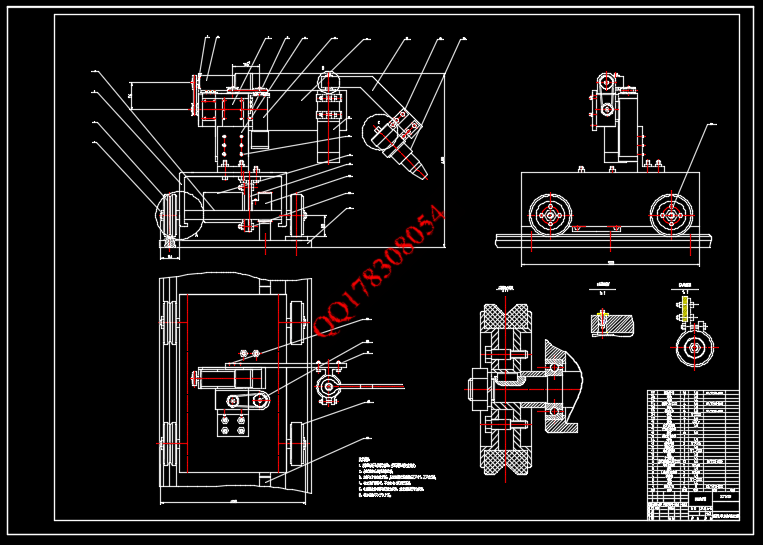
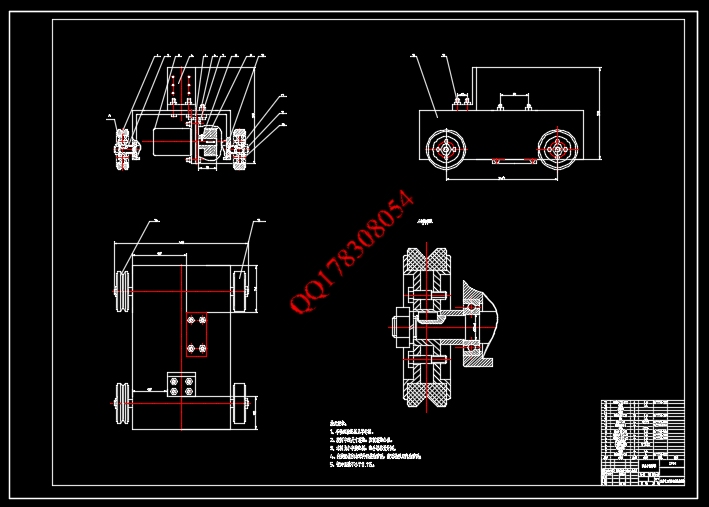
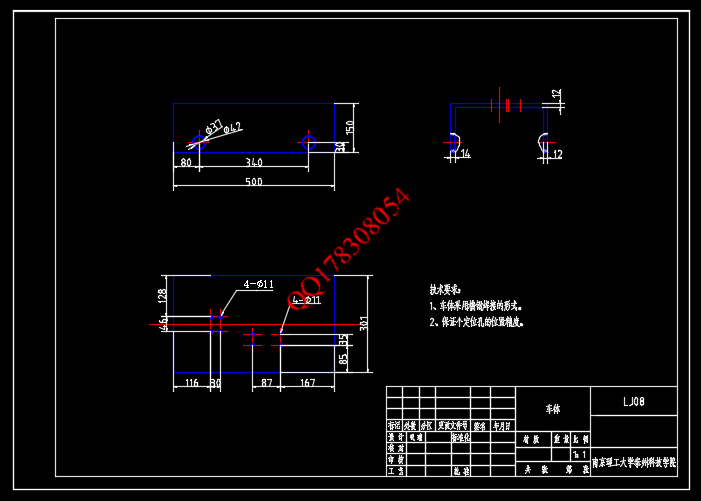
本课题主要完成机器人运动学的逆解、车体的总体设计、电机的选择等方面。主要从机器人运动学逆解的角度完成一个周期内的运动学逆解,求出三个关节应按照什么运动规律进行运动,还有三个关节的运动之间的函数关系,进而完成对整个机器人的总体设。通过对小车的受力分析完成对车轮、车体的设计。根据实际操作中遇到的问题对完成对电机的选择。最后对所选的齿轮进行校核,使之能完成具体的操作要求。
关键词 机器人技术 机构设计 运动学逆解 强度校核
目 录
1 绪论 1
1.1 选题的依据及意义 1
1.2 研究现状及发展趋势 1
1.3 本课题的研究设计内容及方法 3
1.4 课题的完成情况 5
2 焊接机器人机构运动学分析 6
2.1 运动学分析数学基础-齐次变换(D-H变换) 6
2.2 变换方程的建立 7
2.3 运动学分析处理方法 9
2.4 逆解过程 10
2.5 本章小结 28
3 结构设计 30
3.1 小车行走结构设计 30
3.2 摆动关节电机选择 36
3.3 本章小结 36
结束语 38
致 谢 39
参考文献 40
附 录 41
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备