 |
|


|
������� |
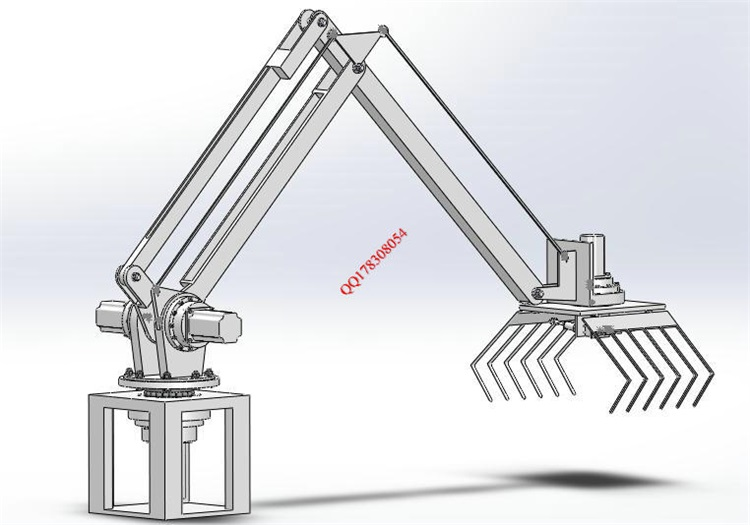
С���������˵Ľṹ��ơ���SW��άͼ�� |
 |
|
��Ʊ�� |
B254 | |
|
������� |
AutoCAD, Word | |
|
�������� |
���Ҳ�ͼƬ | |
|
˵������ |
18000�� | |
|
ͼֽ���� |
���Ҳ�ͼƬ | |
|
�Ƽ�ָ�� |
�ϸ� | |
|
�۸� |
�۸��Ż��� | |
|
�������� |
||
|
������ |
�� | |
|
�������� |
<�鿴��ι���վ���> |
|
��Ƽ�� |
�ĵ�����:
˵����1�ݣ���42ҳ��Լ18000������
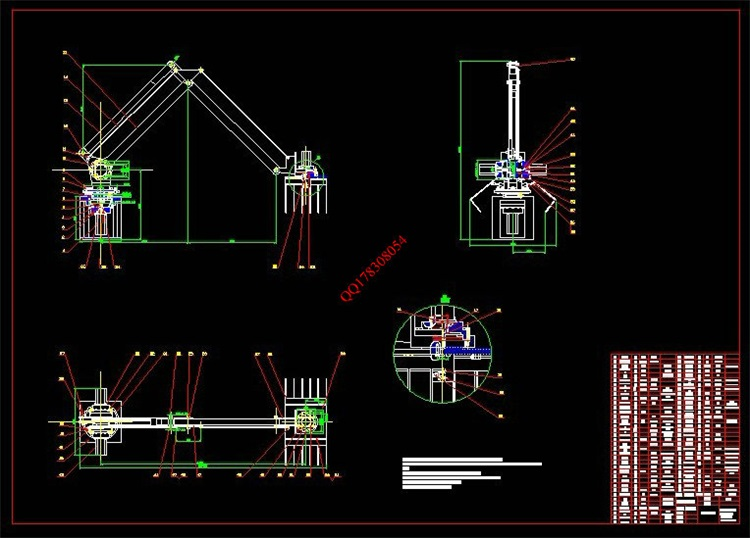
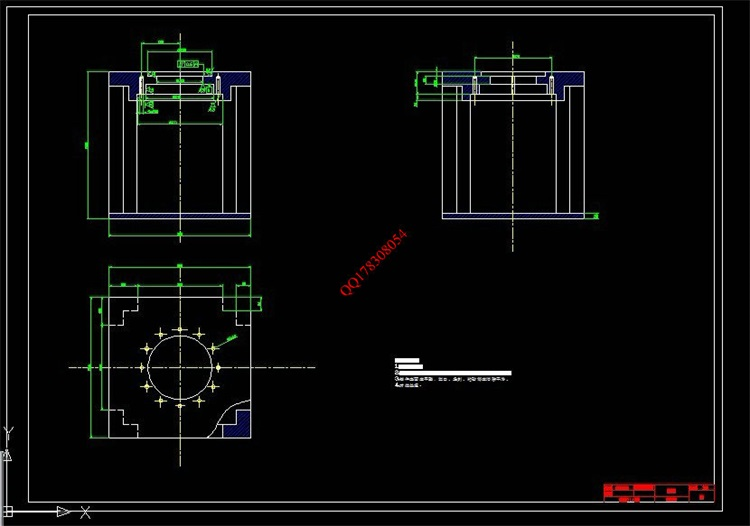
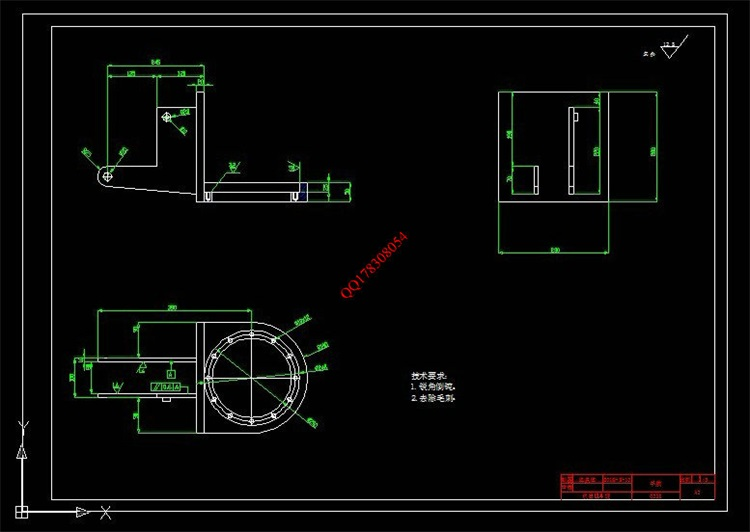
CAD�汾��ͼֽ����10��
SW��άͼһ��
Ŀ¼
Ŀ¼
ժ Ҫ I
ABSTRACT 2
1 ���� 3
1.1���� 3
1.2��ٻ����˵��ص������ 3
1.2.1��̽�����˵��ص� 3
1.2.2��������˵ķ��� 4
1.3�������˵Ĺ������о���״ 5
1.3.1�����������˷�չ��״ 5
1.3.2������K�����˷�չ��״ 6
1.4������Դ������ 6
1.5������Ҫ�о����ݣ� 7
1.6������ 7
2 ����������ṹ����� 8
2.1 ���� 8
2.2�������˱���Ĺ��ͷ��� 8
2.2.1�������˵ļ������� 8
2.2.2��ٻ������������ 9
2.3�۳������� 11
2.3.1 �۵Ľṹ 11
2.3.2ǰ�� 11
2.3.3�� 14
2.3.4 l1 (С�۴�����)��У�� 15
2.3.5��l7 (ǰ�������ˣ�����У�� 15
2.3.6�Դ�۵�У�� 15
2.4 ������ 17
3 �������ؽڵ���� 18
3.1��������� 18
3.2���ٻ������� 19
3.3�������˹ؽڵ���ϸ��� 22
3.3.1��ת�ؽ�T������ 22
3.3.2��ת�ؽ������� 24
3.3.3С����ת�����ѡ�� 27
3.3.4�����ת�����ѡ�� 28
3.5 ������ 29
4�ֲ������ 30
4.1 �ֲ��Ľṹ��� 30
4.1.1 ���� 30
4.1.2 ���ʱӦ���ǵļ������� 30
4.1.3 �ֲ��н����ļ��� 31
4.2 ��ѹ��ѡ�� 32
4.2.1 ��ѹ�ļ�� 32
4.2.2 ��ѹ��ѡ�� 35
4.3 ������ 36
5 ������չ�� 37
5.1 ���� 37
5.2 չ�� 37
����� 38
�� л 39
ժ Ҫ
������Ƶ���һ��ӵ�ж�����ɶȵĻ����ˣ����ڸ�������װ������⡣
���ִ���ҵ�У��������̵Ļ�е�����Զ����ѳ�Ϊͻ�������⡣�����˼��������ü�����ļ��书�ܡ���̹��������Ʋ������Զ���ɹ�ҵ������ijһ��ָ������ĸ��¼������ǵ���������չ�ĸ�������֮һ��Ŀǰ����ҵ��������Ҫ�е��ź��ӡ���Ϳ�������Լ��Ѷ���ظ��Բ����Ͷ�ǿ�ȼ���Ĺ�����������ʽһ���ȡʾ�����ֵķ�ʽ��
�û��������ֲ����ֱۡ������͵�������ɣ��߱������ϣ���ת��תλ�ȶ��ֹ��ܣ����ҽṹ���������㡣������ʽΪ��������������ŷ������
�ؼ��ʣ������ˣ�������ʽ���ṹ��ƣ��ŷ����
|
|
����ͼֽ ��ͼ |
|
˵��: |
�����˽Ȿ��Ƶľ�����ϸ��Ϣ����ϵ��վ�ͷ���˵�����ĸ���ƣ���ţ��ĸ���ϸ����,���ǽ�Զ�̻��ͼ�����ۿ�. ��е��ҵ���|���� |

| [Ҫ��PR��2,�ٶ���¼��1000ҳ;��ϵQQ:178308054] |
����:���ݡ�����������Ȩ������������վ,С�ֻ�е�����̳�,�������Ͼ���ԭ�������У�����ѧϰ����֮�ã�����ת�ز��������Ƿ���;��
Powered by С�ֻ�е�����̳� © 2013-2020 All Rights Reserved. �ͷ�QQ:178308054
ϲ��www.xiaolinbysj.com���������QQ�ϵ�5λ���ѣ���л����֧�֣� ��ICP��2021006205��-1 �Ͼ����������豸
�Ͼ����������豸
Powered by С�ֻ�е�����̳� © 2013-2020 All Rights Reserved. �ͷ�QQ:178308054
ϲ��www.xiaolinbysj.com���������QQ�ϵ�5λ���ѣ���л����֧�֣� ��ICP��2021006205��-1
�Ͼ����������豸