 |
|


|
设计名称 |
市政下水道疏通机器人设计【含SW三维图】 |
 |
|
设计编号 |
B329 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
7700字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共31页,约7700字左右
CAD版本图纸,共8张
SW三维图一份
中文摘要
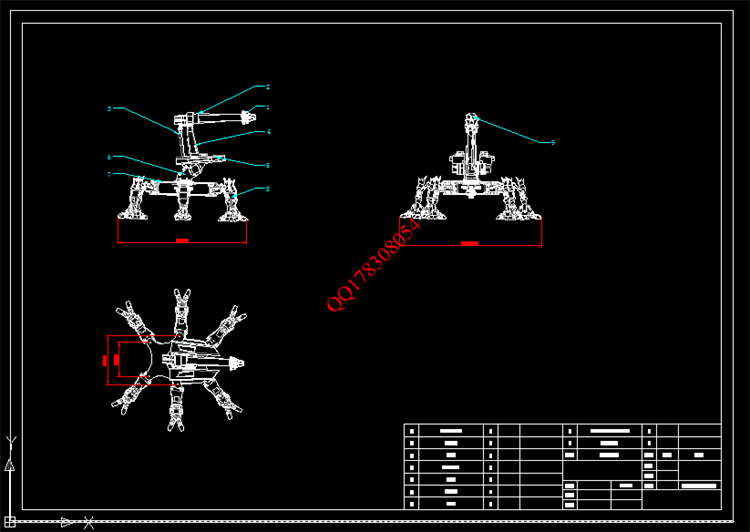
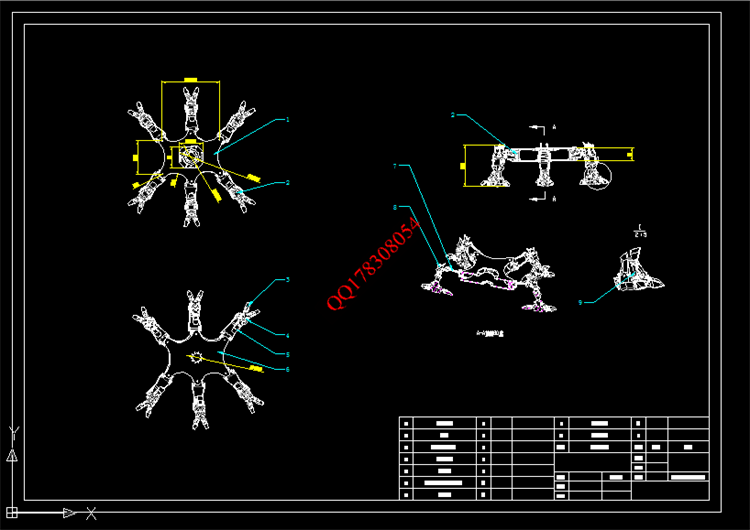
针对市政下水道疏通贵、疏通难、疏通不彻底等问题,本组提出设计“市政下水道疏通机器人”。机器人采用自身携带的液态氮降低堵塞物强度硬度的方法,辅助切割机械臂将堵塞物打成极小的碎块,可自行被下水道水流冲走,以达到疏通效果。
本小组设计的机器人相对于传统非智能设备具有通过性好,稳定性强,智能化程度高,市场需求广泛的特点。极大的减少了人工费用,节约时间,且疏通效果良好。机器人采用CY8C3866AXI-040芯片为控制核心,以传感器反馈信号为控制目标,对仿生的六足结构及其机械臂、上臂等原件进行协调控制。配合具有创新意识的机械结构来实现机器人的稳定运行,完成工作内容,达到疏通效果。
关键字:疏通机器人,智能程度,控制
目录
引言……………………………………………………………………………1
一、 产品设计背景及市场分析…………………………………………………2
1.1产品设计背景………………………………………………………………2
1.2市场分析……………………………………………………………………3
二、 产品概述……………………………………………………………………4
三、 产品硬件设计原理…………………………………………………………5
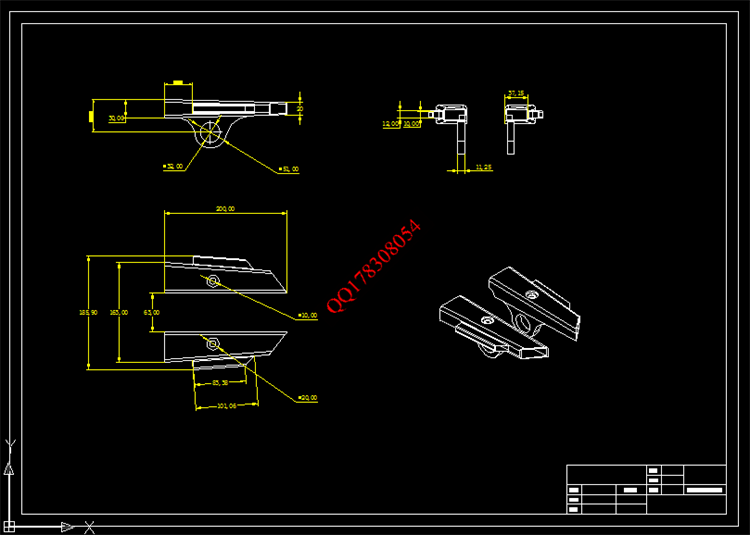
3.1六足结构……………………………………………………………………6
3.2脚部贴合……………………………………………………………………7
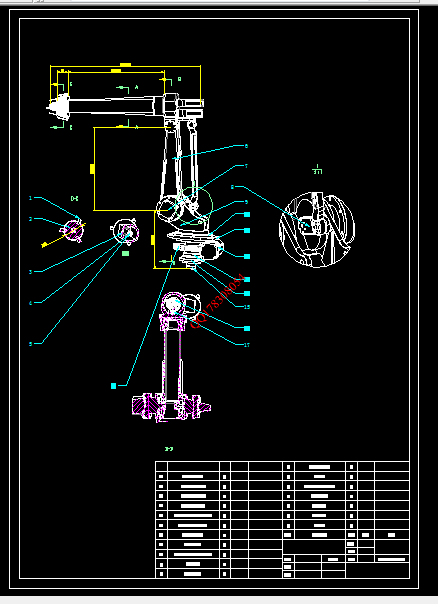
3.3液氮及喷射臂原理…………………………………………………………8
3.4机械臂………………………………………………………………………9
四、 软件设计……………………………………………………………………11
4.1模块化设计………………………………………………………………11
4.2主板模块芯片控制………………………………………………………11
4.4单片机置步汇编程序……………………………………………………13
五、 产品有限元分析……………………………………………………………22
六、 结论…………………………………………………………………………25
七、 参考文献……………………………………………………………………26
八、 致谢…………………………………………………………………………27
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备