 |
|


|
设计名称 |
六足机器人设计【含SW三维图】 |
 |
|
设计编号 |
R324 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
15000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共40页,约15000字左右
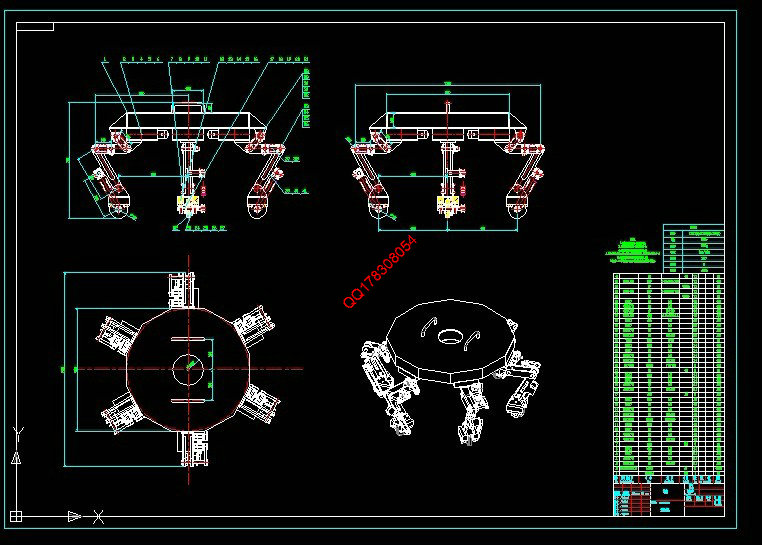
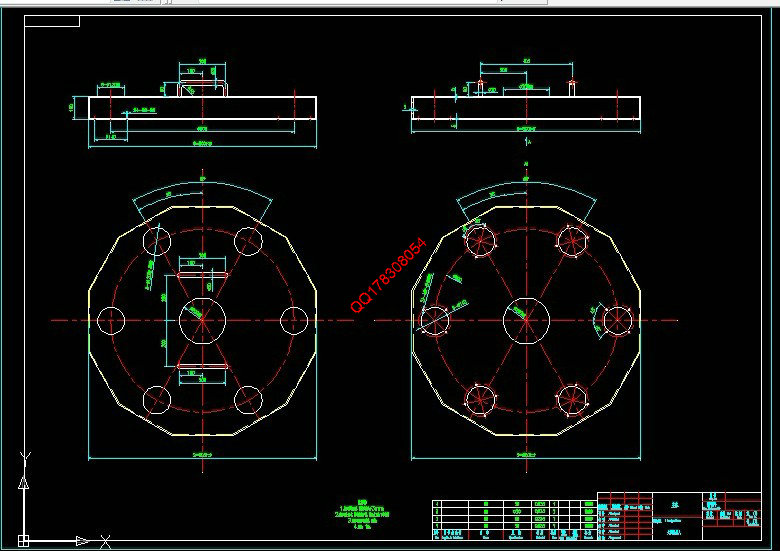
CAD版本本图纸,共7张
sw三维图一份
摘要
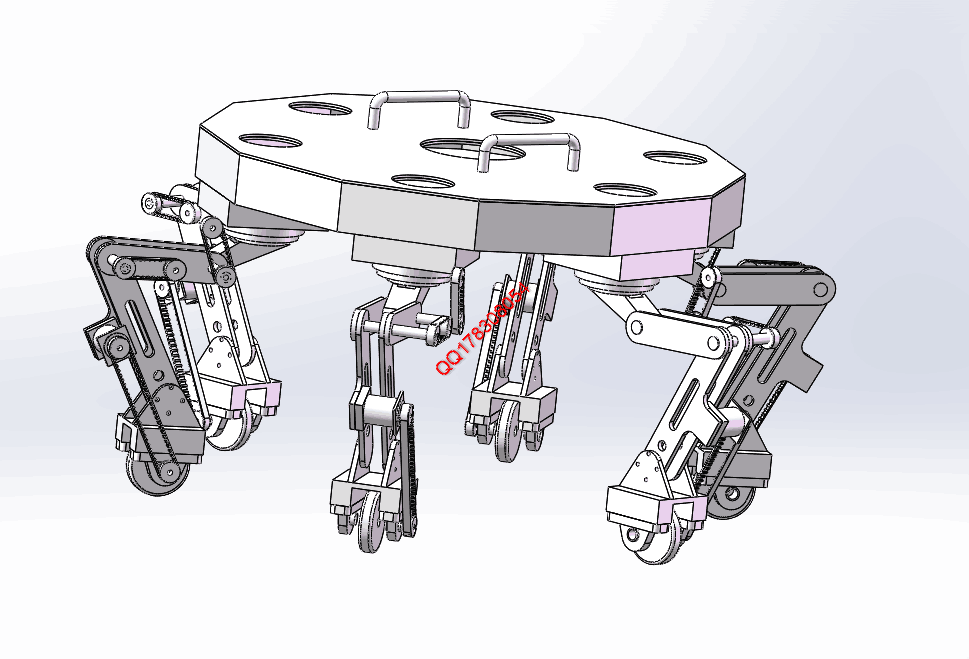
本次毕业设计是关于六足机器人的设计。首先对六足机器人作了简单的概述;接着分析了各部分元件、零件的选型原则及计算方法;然后根据这些设计准则与计算选型方法按照给定参数要求进行选型设计;接着对所选择的各主要零部件进行了校核。本次设计由四个主要部件组成:支撑腿升降装置、支撑腿摆动装置、支撑轮转动装置、主体钢结构。最后简单的说明了说明书的安装与维护。
目前,六足机器人正朝着适应复杂地形、应对恶劣天气、采集多元信号的方向发展,近年来各种特殊功能机器人。在特种机器人设计方面,目前我国与国外先进水平相比仍有较大差距,国内在设计制造特种机器人过程中存在着很多不足。
本次六足机器人设计代表了设计的一般过程, 难免存在各种纰漏、失误;权当一次难得的实践过程,希望对今后的选型设计工作有一定的参考和借鉴价值。
关键词:六足机器人;选型设计;主要部件;养护维修。
目录
摘要 1
Abstract 1
目录 2
一、绪论 4
二、 六足机器人设计概述 6
2.1.六足机器人的工作原理 6
三、 六足机器人的设计计算 8
3.1 已知原始数据及工作条件 8
3.2 计算步骤 8
3.2.1 外形尺寸的确定: 8
3.3.2 主要阻力计算 9
3.3.3 主要特种阻力计算 10
3.3.4 附加特种阻力计算 10
3.3.5 倾斜阻力计算 11
3.4传动功率计算 11
3.4.1 走行轮功率( )计算 11
3.5 传动链张力计算 12
3.6 传动链轮最大扭矩计算 12
3.7 走行轮及轴 13
3.7.1 走行轮的作用及类型 13
3.7.2轴的作用及类型 16
3.7.3轴与轮的配合结构 21
3.8电机的选用 32
3.9减速器的选用 33
3.9.1 传动装置的传动比: 33
3.10制动装置 35
3.10.1制动装置的作用 35
3.11 转向装置 35
四、 电气及安全保护装置 37
结论 38
致谢 39
参考文献 39
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备