 |
|


|
设计名称 |
运送铝活塞铸造毛坯机械手设计2 |
 |
|
设计编号 |
R532 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
12000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
说明书1份,共25页,约12000字左右
CAD版本图纸,共24张
中文摘要
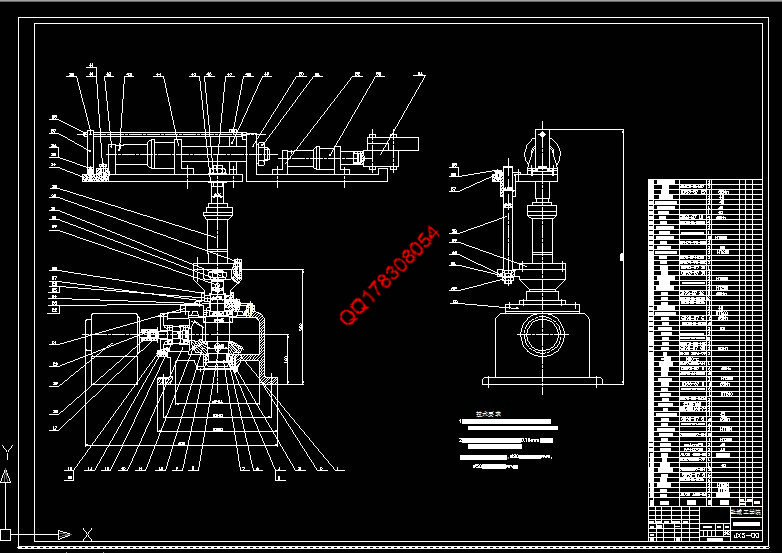
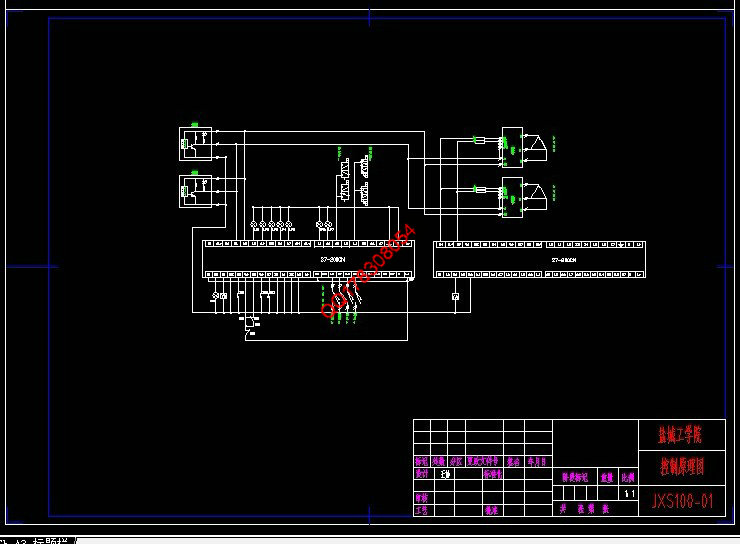
在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机器人等。而工业机器人是相对较新的电子设备,它正开始改变现代化工业面貌。实际的机器人由带有腕(或称为手臂)的主机身和机身端部的工具(通常是某些类型的夹持器)组成,同时也包括一个辅助动力系统。本文是对整个设计工作较全面的介绍和总结。该机械手的设计重点是总体设计和控制设计两部分,总体设计包括确定机械手的外形尺寸和工作空间,拟定机械手各环节的总体运动方案,对机械手抓取物体的形式以及整体结构进行详细设计,选择气动的方式作为机械手的动力,并合理布置气缸的位置,确定各级传动参数,对齿轮、气缸、轴和轴承的进行设计计算和校核。控制设计包括选取西门子S7-200PLC作为控制器,编写出全部程序,并构建一个完整的机、电、气动一体化的综合性控制系统。本次设计需要掌握PLC的运行原理、PLC程序的编写方法、变频器的实现原理、变频器的配置、传感器的原理,合理的连接各个系统部件,调节控制系统各个部分协同工作,控制电机的运行等。设计完成后,整个系统能满足实验的要求,结构简单,装卸方便,便于维修、调整,并具有刚性好,位置精度高、系统运行平稳的特点,基本满足设计要求。
关键词:手臂;夹持器;工业机器人;控制系统
目录
中文摘要 ……………………………………………………………………………………… 1
Abstract ……………………………………………………………………………………… 1
第1章 绪论………………………………………………………………………………… 2
1.1工业机器人简介…………………………………………………………………………… 2
1.2工业机器人的发展………………………………………………………………………… 2
第2章 工业机器人的总体设计……………………………………………………………… 3
2.1工业机器人的组成及各部分关系概述…………………………………………………… 3
2.2工业机器人的设计分析…………………………………………………………………… 3
2.2.1设计要求……………………………………………………………………………… 3
2.2.2总体方案拟定………………………………………………………………………… 3
2.2.3工业机器人主要技术性能参数……………………………………………………… 4
第3章 工业机器人的机械系统设计……………………………………………………… 5
3.1工业机器人的运动系统分析…………………………………………………………… 5
3.1.1 机器人的运动概述………………………………………………………………… 5
3.1.2 机器人的运动过程分析…………………………………………………………… 6
3.2工业机器人的执行机构设计…………………………………………………………… 7
3.2.1 末端执行机构设计………………………………………………………………… 7
3.2.1.1 设计时要注意的问题:……………………………………………………… 7
3.2.1.2 总体结构设计……………………………………………………………… 7
3.2.1.3 液压油缸的选择和夹紧力的校验………………………………………… 8
3.2.1.4 弹性爪的强度校验…………………………………………………………… 10
3.2.2 手臂机构的设计………………………………………………………………… 10
3.2.2.1 手臂的设计要求…………………………………………………………… 10
3.2.2.2 伸缩液压油缸的选择……………………………………………………… 11
3.2.2.3 活塞杆的强度校核………………………………………………………… 11
3.2.3 腰部和基座设计………………………………………………………………… 13
3.2.3.1 结构设计…………………………………………………………………… 13
3.2.3.2 步进电机的选取…………………………………………………………… 13
3.2.3.3 轴承的选取………………………………………………………………… 16
3.2.3.4 齿轮的选取………………………………………………………………… 17
第4章 工业机器人的计算机控制系统概述……………………………………………… 18
4.1 工业机器人控制系统的特点及对控制功能的基本要求……………………………… 18
4.2 计算机控制系统的设计方案…………………………………………………………… 18
4.3 硬件电路的组成………………………………………………………………………… 19
4.4 电路接口说明…………………………………………………………………………… 19
第5章 工业机器人运行时应采取的安全措施……………………………………………… 21
5.1 安全要求………………………………………………………………………………… 21
5.2实施方法………………………………………………………………………………… 21
总 结……………………………………………………………………………………… 22
鸣 谢……………………………………………………………………………………… 23
参考文献……………………………………………………………………………………… 24
|
|
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备