 |
|


|
设计名称 |
柑橘采摘机器人机器臂的结构设计与分析 |
 |
|
设计编号 |
S318 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
17000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
||
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
文档包括:
Word版说明书一份,共42页,约17000字
任务书一份
开题报告一份
外文翻译一份
CAD版本图纸,共11张
摘 要
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业柑橘采摘机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业柑橘采摘机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业柑橘采摘机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文将设计一台五自由度的工业柑橘采摘机器人,用于给采摘水果。首先,本文将设计柑橘采摘机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建柑橘采摘机器人的结构平台;在此基础上,本文将设计该柑橘采摘机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和柑橘采摘机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测柑橘采摘机器人的各个关节的运动情况、柑橘采摘机器人的示教编程和在线修改程序、设置参考点和回参考点。
关键词:柑橘采摘机器人,示教编程,伺服,制动
目 录
摘要………………………………………………………………………………i
Abstract…………………………………………………………………………ii
第1章 绪论………………………………………………………………………1
1.1 柑橘采摘机器人概述……………………………………………………1
1.2 柑橘采摘机器人的历史、现状…………………………………………3
1.3 柑橘采摘机器人的发展趋势……………………………………………4
第2章 柑橘采摘机器人机械手的设计……………………………………………5
2.1自由度及关节…………………………………………………………… 5
2.2 基座及连杆…………………………………………………………… 5
2.2.1 基座……………………………………………………………… 5
2.2.2 大臂……………………………………………………………… 5
2.2.3 小臂……………………………………………………………… 6
2.3 机械手的设计……………………………………………………………6
2.4 驱动方式…………………………………………………………………9
2.5 传动方式…………………………………………………………………11
2.6 制动器……………………………………………………………………13
2.7机械臂的肩部结构分析…………………………………………………16
2.7.1作用原理…………………………………………………………16
2.7.2结构及分析………………………………………………………16
第3章 控制系统硬件……………………………………………………………19
3.1 控制系统模式的选择……………………………………………………19
3.2 控制系统的搭建………………………………………………………20
3.2.1 工控机……………………………………………………………20
3.2.2 数据采集卡………………………………………………………20
3.2.3 伺服放大器…………………………………………………… 21
3.2.4 端子板…………………………………………………………… 22
3.2.5电位器及其标定………………………………………………… 23
3.2.6电源……………………………………………………………… 27
第4章 控制系统软件…………………………………………………………27
4.1预期的功能……………………………………………………………27
4.2 实现方法…………………………………………………………… 28
4.2.1实时显示各个关节角及运动范围控制 …………………… 28
4.2.2直流电机的伺服控制……………………………………………28
4.2.3电机的自锁………………………………………………………28
4.2.4示教编程及在线修改程序………………………………………31
4.2.5设置参考点及回参考点…………………………………………32
第5章 总结………………………………………………………………………32
5.1 所完成的工作………………………………………………………… 32
5.2 设计经验………………………………………………………………33
5.3 误差分析………………………………………………………………33
5.4 可以继续探索的方向………………………………………………… 34
致 谢………………………………………………………………………………36
参考文献……………………………………………………………………… 37
|
|
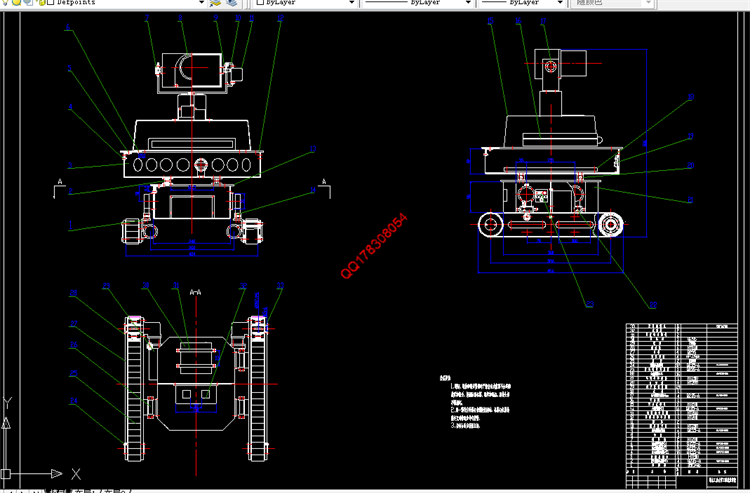
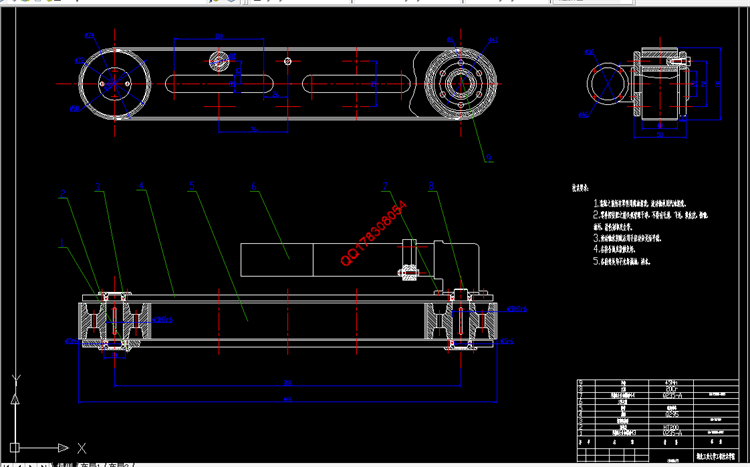
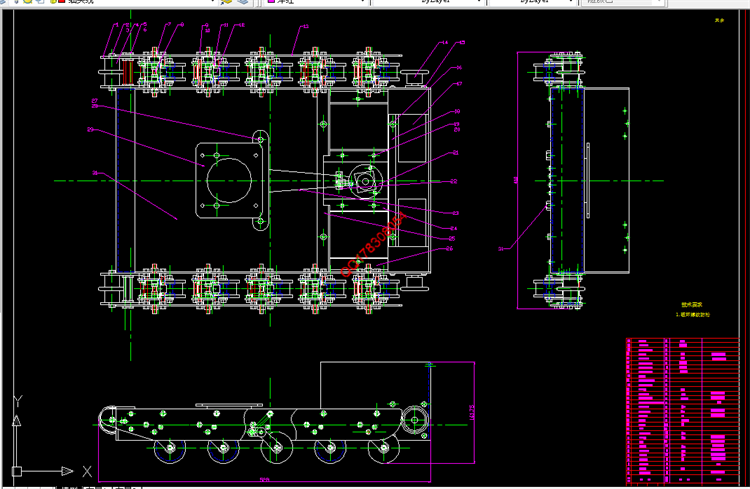
部分图纸 截图 |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
声明:根据《互联网传播权保护条例》本站,小林机械资料商城,所列资料均属原创者所有,仅供学习交流之用,请勿转载并做其他非法用途。
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1 南京德龙屠宰设备
南京德龙屠宰设备
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
南京德龙屠宰设备