|
设计描述:
文档包括:
说明书一份,38页,约18000字
开题报告一份
CAD版本图纸,共14张
摘 要
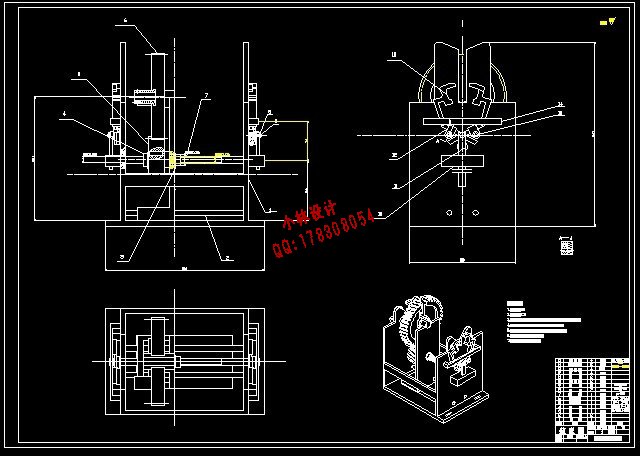
在一切追求人性化的今天,越来越多繁重、危险和高难度的工作,开始采用机器人(包括机械手)来代替人类完成。裸高压导线输电线路的高空接线工作,一直是困扰高空作业人员的棘手问题,由于其危险性极大,作业条件艰难,仅靠人力很难做到,所以都是借助高空作业车的帮助来实现的。近年来,越来越多的人致力于多自由度的高空全自动绕线装置的研究,试图找到一种简便、经济、安全、有效的方法,来解决这一难题。因此,无攀爬式全自动高空接线机器人应运而生,该机器人通过实现高空握持导线、不规则的圆周绕线运动和横向进给运动等动作,来完成绕线任务。通过对各种方案的对比,决定采用斜齿轮传动绕线,螺旋传动进给来实现主要功能。
本设计构思新颖,而且具有结构轻便、经济适用、效率高、安全等显著优势,顺应时代发展方向,具有很高的可行性,适用于各种工作场合。
关键词:无攀爬式;自动绕线;斜齿轮传动;进给;螺旋传动
ABSTRACT
In this information era, more and more heavy, dangerous and difficult works are being done by robot, manipulator included. The connection of bare high-tension wire has always been troubled steeplejacks. It’s extremely dangerous, and the work condition is hard, so people have to get help from the aloft working car. In recent years, more and more people are concentrated on development of device of full-automatic high altitude wiring. They try to find a convenient, economical, safely and efficient program to solve this problem. Then the no climbing full-automatic high altitude wiring robot comes out. It accomplishes its task by holding wires in high attitude, coiling in circle irregularly and transverse feed. Through the comparison of several programs, the helical gearing and screw driven are used to wiring and feed, respectively.
This design has a novel idea, and it has advantage of light structure, economic and applicable, efficient and safely. It complies with the development of era and can work in any conditions.
Key words: no climbing; full-automatic wiring; helical gearing; feed; screw driven
目 录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题研究背景 1
1.2 课题研究目的和意义 1
1.2.1 课题研究目的 1
1.2.2 课题研究意义 1
1.3 国内外发展现状 2
1.4 发展前景展望 4
第2章 总体方案确定 5
2.1 齿轮齿条绕线机构 5
2.2 内啮合齿轮绕线机构 6
2.3 斜齿轮啮合绕线机构 6
2.4 本章小结 7
第3章 参数的确定及电机的选择 8
3.1 绕线机构参数的确定 8
3.2 进给机构参数的确定 11
3.3 抓线和导线握持机构参数的确定 13
3.3.1 抓线机构参数确定 13
3.3.2 导线握持机构参数的确定 15
3.4 电机的选择 16
3.4.1 进给机构电机的选择 16
3.4.2 握持机构电机的选择 17
3.5 本章小结 18
第4章 绕线机构设计 19
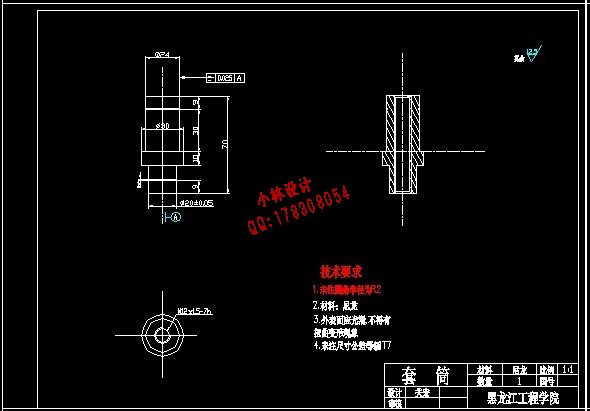
4.1 绕线机构结构设计 19
4.2 进给机构结构设计 20
4.3 支架结构设计 20
4.4 本章小结 22
第5章 抓取机构的设计 24
5.1 抓线机构结构设计 24
5.2 导线握持机构结构设计 24
5.3 本章小结 25
第6章 实体机构装配 26
6.1 实体机构装配 26
6.2 本章小结 29
结论 30
参考文献 31
致谢 32
1.2.2 课题研究意义
在一切智慧化、人性化、高效率化的今天,越来越多的机器人代替人进行繁重、危险的劳动,在一很多高度危险和繁重的工作中,都采用了机器人,它们的高效率和几乎为零的风险是人类无法与之相比的优势。机器人技术的采用显著减轻了工人的劳动强度和工作负担,大大改善了劳动条件,提高了劳动生产率和自动化水平。在高空裸导线的接线中,以前都需要操作人员攀高接线,劳动强度大、安全性不可靠;而无攀爬式全自动高空接线机器人能够代替工人进行高空作业,避免了工作中潜在的各种危险,同时提高了工作效率,并且减少了高压输电线路的电流损耗,也为低碳经济提供了一个新的探索方案。该设计经济实用性高,具有光明的发展前景。
本设计是主要实现高空握持导线、不规则的圆周绕线运动和横向进给运动的全新自动绕线装置具体设计要求如下:
导线直径: 10mm
绕线直径:2 mm
绕线材料: 铝
导线高度:20m
整机重量:7.5kg
完成绕线时间:1分钟左右
要求经济适用,效率高。
|