|
设计描述:
文档包括:
说明书一份,31页,17000字左右.
任务书一份
开题报告一份
CAD版本图纸,共19张:
题目名称
上肢康复机器人结构设计及运动仿真(结构设计)
一、设计目的、意义
设计目的:
设计一种坐式上肢康复训练机,用于心脑血管疾病致瘫或意外事故所造成的上肢体损伤的患者左上肢及相关关节康复训练。由于康复训练机器人要与人体直接相连,来带动肢体进行康复训练,所以对驱动器的安全性、柔性的要求较高。
设计意义:
近年来,由于心脑血管疾病使中老年患者出现偏瘫的人数不断增多,而且在年龄上呈现年轻化趋势。与此同时,由于交通事故而造成神经系统损伤或者肢体损伤的人数也越来越多。为了提高这类人群的生活质量,基于治疗、康复和服务于一身的产品的需求趋势不断增高。随着机器人技术和康复医学的发展,医疗康复机器人的市场占有率呈逐年上升的趋势,因此,服务于四肢的康复设备的研究和应用有着广阔的发展前景。
康复机器人是康复设备的一种。康复机器人技术早已广受世界各国科研工作者和医疗机构的普遍重视,在我国康复医学工程虽然得到了普遍的重视,而康复机器人研究仍处于起步阶段,一些简单康复器械远远不能满足市场对智能化、人机工程化的康复机器人的需求,有待进一步的研究和发展。
二、设计内容、技术要求(研究方法)
设计内容:
1. 上肢康复训练机器人原理分析,选择合理的设计方案,进行总体结构设计;
2. 康复机器人上肢前后摆机构设计及康复机器人屈伸机构设计;
3. 分合机构设计及手腕转动机构设计;
4. 康复机器人伺服元件的选择。
技术要求:
1. 机器人采用电机驱动;
2. 在对患者进行康复训练的过程中,能够在任何位置实现安全的停止;
3. 康复机器人:宽度1.5m,整体高度1.4m~1.7m;
4. 能够实现对上肢的上下、屈伸、分合以及手腕转动的康复训练;
三、设计完成后应提交的成果
1.设计说明书一份,字数不少于1.5万字;
2.图纸量折合后不少于3张A0,其中,至少包含1张A0总体结构装配图。
四、设计进度安排
2012.2.27-2012.3.20 收集资料,查阅文献,撰写开题报告;
2012.3.21-2012.4.3 确定设计方案,进行总体结构设计;
2012.4.4-2012.4.17 康复机器人上肢前后摆机构设计及康复机器人屈伸机构设计;
2012.4.18-2011.4.30 分合机构设计及手腕转动机构设计;
2012.5.1-2012.5.14 伺服元件选择;
2012.5.15-2012.6.5 绘制、修改总体结构装配图及零件工作图;
2012.6.6-2012.6.15 撰写设计说明书,整理材料,准备答辩。
五、主要参考资料
[1]吕广明,孙立宁,彭龙刚.康复机器人现状及关键技术分析[J].哈尔滨工业大学学报,2006.
[2]刘珊.人体上肢与上肢康复机器人运动控制研究[D].华中科技大学,2008.
[3]乎昊.3DOF可穿戴式上肢康复机器人结构设计及仿真研究[D].哈尔滨工程大学,2008.
[4]杨恩霞.机械设计[M].哈尔滨:哈尔滨工程大学出版社,2006.
[5]胡宇川,季林红.一种偏瘫上肢复合运动韵康复动训练机器人[J].机械设计与制造,2007.
[6]Mathieup.EM Gand Kinematics of normal subject performing trunk flexion/extensions freely in space[J].Journal of Electromyography and Kinesiology, 2008.
[7]Hoppenotp, Collee.Localization and control of a rehabilitation mobile robot by close human-machine cooperation[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2009.
[8] 杜志江,孙立宁.外科机器人技术发展现状及关键技术分析[J].哈尔滨工业大学学报,2008.
摘 要
康复机器人是康复设备的一种类型,康复机器人技术早已广受世界各国科研工作者和医疗机构的普遍重视,其中以欧美和日本的成果最为显著。在我国康复医学工程虽然得到了普遍的重视,但是康复机器人研究仍处于起步阶段,一些简单康复器械远远不能满足市场对智能化、人机工程化康复机器人的需求,有待进一步的研究和发展。
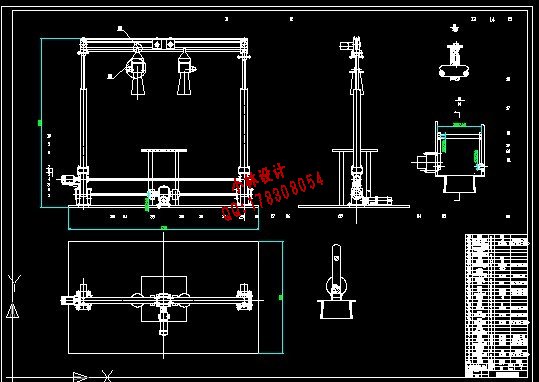
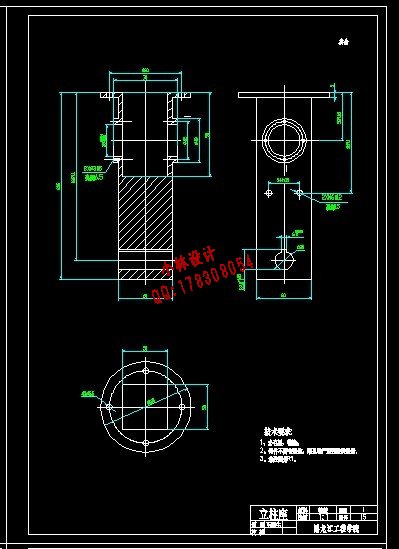
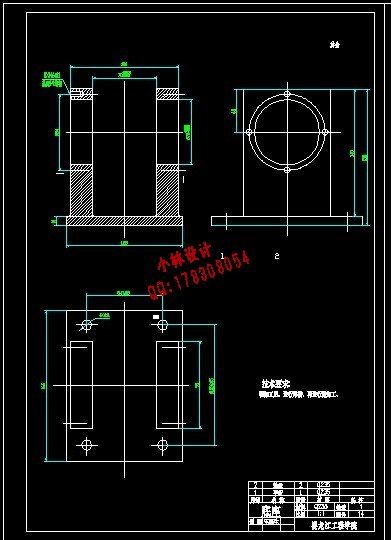
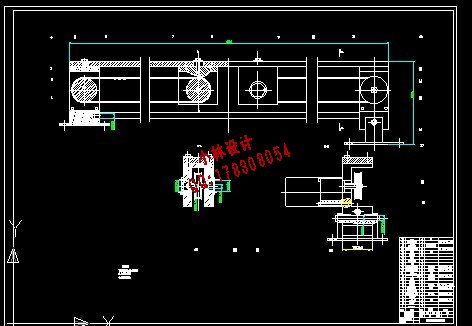
本文从使用的角度对人体上肢的运动原理进行了分析,设计出了一种坐式上肢康复训练机器人,用于心脑血管疾病致瘫或者意外事故所造成上肢损伤的患者作上肢及其相关关节的康复训练。本设计的康复机器人机身是由放置于平台上的机座,两根可伸缩的立柱和上横梁及其手柄组成,并在其各个组成部分上分别装上上肢屈伸机构、前后摆机构、分合机构和手腕旋转机构;各运动机构由单独的电机和减速器驱动,而传动机构的主件分别是传动轴、丝杠螺母副、同步齿形带传动副。
康复机器人的立柱主要采用薄壁套筒,这样既减轻了重量,也使得丝杠螺母副能构得到套筒的固定和定位。整个设计主要要注意的主要问题是减重和减噪,避免整体结构过于庞大笨重。
关键词:康复;上肢;结构设计;减重;噪音
ABSTRACT
Rehabilitation robot is a type of rehabilitation facilities. Rehabilitation robotics have long been well received by the world scientists and the general importance of medical institutions, in which Europe and the United States and Japan, the results are the most significant. Medical Engineering in our country has been received widespread attention though, and rehabilitation robotics still in its infancy, some simple rehabilitation equipment is far from meeting intelligence, ergonomics of the rehabilitation robot needs to be further research and development.
This perspective on the human body from the use of upper limb movement principle is analyzed,the seated upper extremity rehabilitation robot is designed , for the paralysis caused by cardiovascular diseases or accidents. The design of the rehabilitation robot body is placed on the platform base, two scalable columns and beams of the handle on the composition and its components are installed on the upper limb flexion which include separate and close agency, before and after agency, lifting agency and the wrist rotation agency; the every movement is driven by the separate drive motor and reducer, and the main parts are the shaft, screw nut pairs, timing belt, deputy.
Rehabilitation robot column mainly adopts the thin wall sleeve, so as to reduce weight, also makes the lead screw nut pair can be fixed and the positioning sleeve. The design of the main attention to the major problem is the weight loss and noise reduction, avoid the whole structure is too bulky.
Key words:rehabilitation;upper limb;structural design;Weight loss; noise
1.4 本课题主要研究内容
本实用“上肢康复机器人”的机身是由放置于地面上的基座、两根可以伸缩的立柱和上横梁组成,并在其各组成部分上分别装配上肢前后摆动机构上肢屈伸机构和上肢分合机构;各运动机构由单独的电机和减速器驱动,而传动机构的主件分别是传动轴、丝杠螺母副、同步齿形带。在单片机的控制下,实现患者的上肢前后摆、屈伸、分合运动以及手腕的转动康复训练;也可启动部分电机,完成其中的部分康复训练[14]。具体内容如下:
1、首先对上肢康复训练机器人进行原理分析,然后选择合理的设计方案,进行总体结构设计;
2、康复机器人上肢前后摆结构设计及康复机器人屈伸机构设计
3、分合机构设计及手腕转动机构设计
4、设计出系统的零部件,完成驱动原件和标准件的选择和校核,主要包括丝杠、齿轮等机构的设计计算。确定结构尺寸,形状,材料,动力等参数,对齿轮、主轴、轴承进行必要的校核、验算;
5、手绘和计算机绘制相结合,绘制整体装配图及主要零部件的零件图;
|