 |
|


|
设计名称 |
机床上下料机械手设计 |
 |
|
设计编号 |
F072 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
39000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.09.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
设计描述:
文档包括: CAD版本图纸,共7张
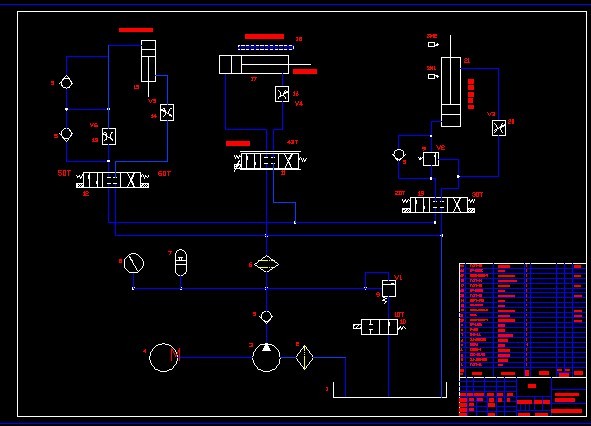
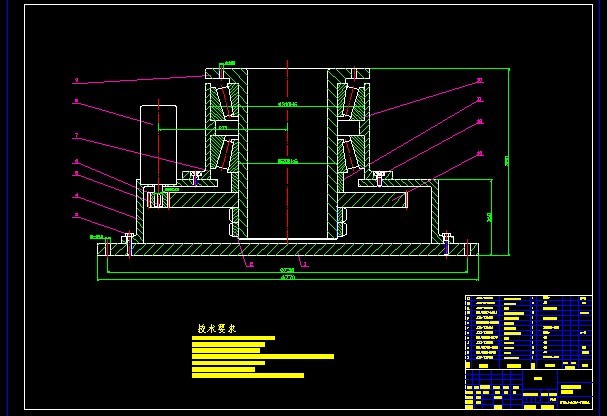
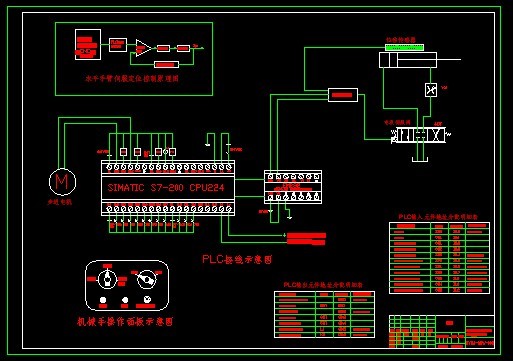
摘 要 通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式的数控机床上下料机械手。重点针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。具体进行了机械手的总体设计,腰座结构的设计,机械手手臂结构的设计,机械手腕部的结构设计,末端执行器(手爪)的结构设计,机械手的机械传动机构的设计,机械手驱动系统的设计。同时对液压系统和控制系统进行了理论分析和计算。基于PLC对机械手的控制系统进行了深入细致的设计,通过对机械手作业的工艺过程和控制要求的分析,设计了控制系统的硬件电路,同时编制了机械手的控制程序。设计达到了设计的预期目标。 关键词:机械手;PLC;液压伺服定位;电液系统
Abstract Integrate the knowledge of the past four years’ of undergraduate course of Machine, discuss and analysis the each part and function of manipulator; design a kind of cylinderical coordinate manipulator used to pack and unload work piece for CNC machine tools. In particular, made the detailed design about base, arm, and end effector and the control system etc. including Total design, waist’s construction design, the arm’s construction design, the wrist’s construction design, the end effector’s construction design, and the drive system of manipulator. At the same time, analysis and compute the hydraulic pressure system and control system. Deeply design the manipulator’s control system, which based on PLC. After analysis about the craft process and the requests of the manipulator, the hardware circuit and the control program of the manipulator then is designed. In a word, the design of the manipulator has come to the anticipant object. Keyways: Manipulator;PLC;Hydraulic servo control;Electrohydraulic system
第1章 绪论 1
2.7.2工业机器人驱动系统的选择原则 19
专题部分 53 |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
