|
���������
�ĵ�����:
Word��˵����һ�ݣ�24ҳ��Լ16000��
���ķ���һ��
CAD�汾ͼֽ����9��
Ŀ��¼
Ŀ¼ …………………………………………………………………………………………… 1
����ժҪ ……………………………………………………………………………………… 2
Abstract ……………………………………………………………………………………… 2
��1�� ���� ……�E………………………………………………………………………… 3
��2�� ��ҵ�����˵�������� …………………………………………………………… 3
2.1 ��ҵ�����˵���ɼ������ֹ�ϵ���� …………………………………………… 3
2.2 ��ҵ�����˵���Ʒ��� ……………………………………………………………… 4
2.2.1 ���Ҫ�� ………………………………………………………………………… 5
2.2.2 ���巽���ⶨ …………………………………………………………………… 5
2.2.3 ��ҵ�����˵���Ҫ�������� ………………………………………………… 5
��3�� ��ҵ�����˵Ļ�еϵͳ��� ……………………………………………………… 6
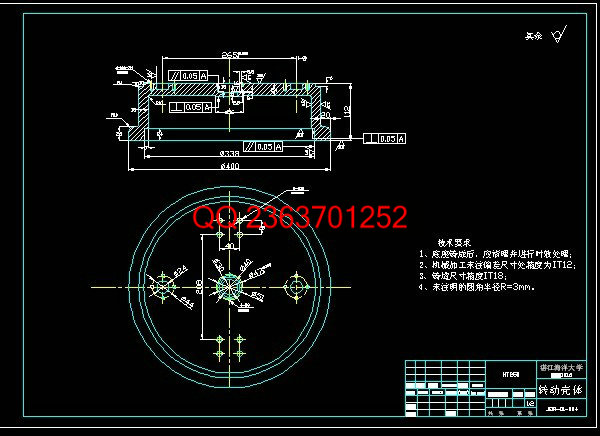
3.1 ��ҵ�����˵��˶�ϵͳ���� ……………………………………………………… 6
3.1.1 �����˵��˶����� ……………………………………………………………… 6
3.1.2 �����˵��˶����̷��� ……………………………………………………… 7
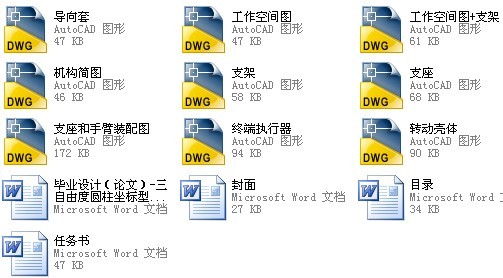
3.2 ��ҵ�����˵�ִ�л������ ……………………………………………………… 8
3.2.1 ĩ��ִ�л������ ……………………………………………………………… 8
3.2.2 �ֱۻ������ ………………………………………………………………… 11
3.2.3 �����ͻ������ ………………………………………………………………… 12
3.3 ��ҵ�����˵Ļ�е����װ����� �E……………………………………………… 18
3.3.1 ����˿�ܵ�ѡ�� ………………………………………………………………… 18
3.3.2 г�����ֵ�ѡ�� ………………………………………………………………… 19
3.3.3 ��������ѡ�� ………………………………………………………………… 20
��4�� ��ҵ�����˵ļ��������ϵͳ���� ……………………………………………… 20
4.1 ��ҵ�����˿���ϵͳ���ص㼰�Կ��ƹ��ܵĻ���Ҫ�� �E……………………… 21
4.2 ���������ϵͳ����Ʒ��� ……………………………………………………… 22
4.3 Ӳ����·����� ………………………………………………………………… 22
��5�� ��ҵ����������ʱӦ��ȡ�İ�ȫ��ʩ …………………………………………… 22
5.1 ��ȫҪ�� ………………………………………………………………………… 22
5.2 ʵʩ���� …………………………………………………………………………… 23
��л ……………………………………………………………………………………… 23
�ο����� ………………………………………………………………………………… 24
����ժҪ
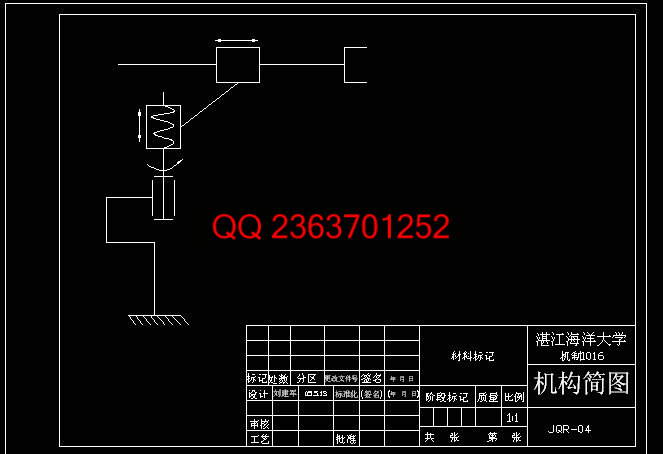
�ڹ�ҵ�ϣ��Զ�����ϵͳ���Ź㷺��Ӧ�ã��繤ҵ�Զ����������ƣ������ϵͳ�������˵ȡ�����ҵ����������Խ��µĵ����豸��������ʼ�ı��ִ�����ҵ��ò�������Ϊ�����ɶ�Բ��������ҵ�����ˣ��乤������Ϊ����ֱ�߷����һ����ת�����ڿ������������£���ִ�н�������һ����ˮ���õ���һ����ˮ����һ�Ķ���,�����Ƕ�������ƹ�����ȫ��Ľ��ܺ��ܽᡣ
�ؼ��ʣ������ɶȣ�Բ�����꣬��ҵ������
Abstract
Industrially, automatic control systems are found in numerous applications, such as automation machine tool control, computer systems and robotics. Industrial robots are relatively new electromechanical devices that are beginning to change the appearance of modern industry. This scheme introduced a cylindrical robot for three degree of freedom. It is composed of two linear axes and one rotary axis current control only allows these devices move from one assembly line to other assembly line in space, perform relatively simple taskes. This paper is more comprehensive introduction and summing-up for the for the whole design work.
Key words ��three degrees of freedom, cylindrical, Industrial robot
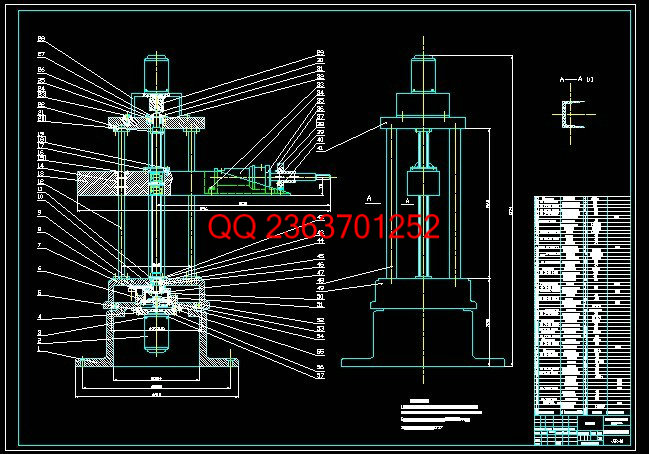
�����ɶ�Բ��������ҵ���������
|