 |
|


|
设计名称 |
工业机器人设计 |
 |
|
设计编号 |
V047 | |
|
设计软件 |
AutoCAD, Word | |
|
包含内容 |
见右侧图片 | |
|
说明字数 |
17000字 | |
|
图纸数量 |
见右侧图片 | |
|
推荐指数 |
较高 | |
|
价格: |
价格优惠中 | |
|
整理日期 |
2013.9.26 | |
|
整理人 |
小林 | |
|
购买流程 |
<查看如何购买本站设计> |
|
设计简介 |
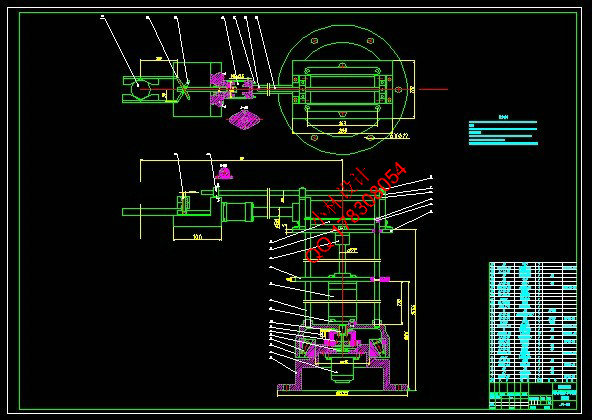
设计描述:
文档包括: CAD版本图纸,共11张
温,有毒,易燃,放射性和其他相对较差的工作环境。机器人可用于在生产过程中的自动化抓住并移 动工件自动化设备,它是在生产过程的机械化和自动化,开发出一种新的类型的设备。近年来,随着 电子技术,特别是计算机的广泛使用机器人的开发和生产的高科技领域已成为迅速发展起来的一项新 兴技术,它更促进机器人的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手能
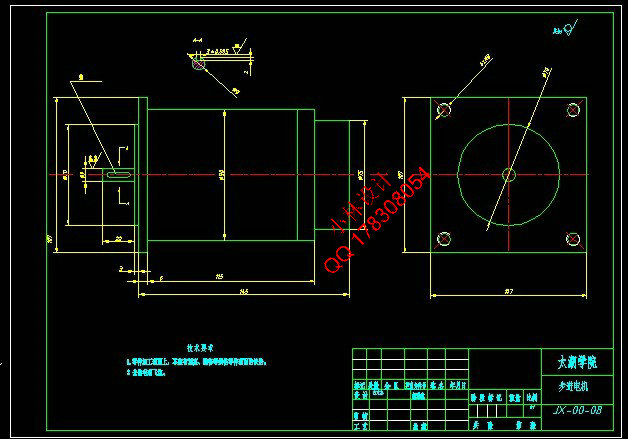
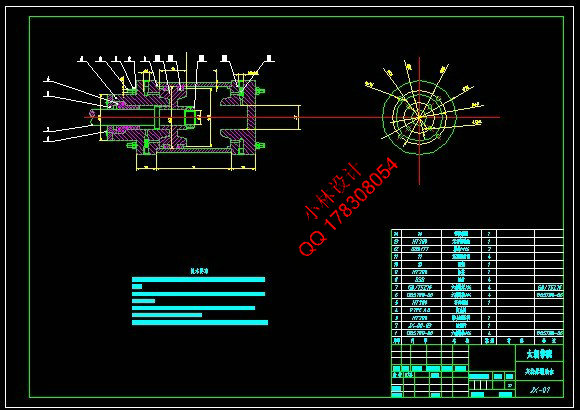
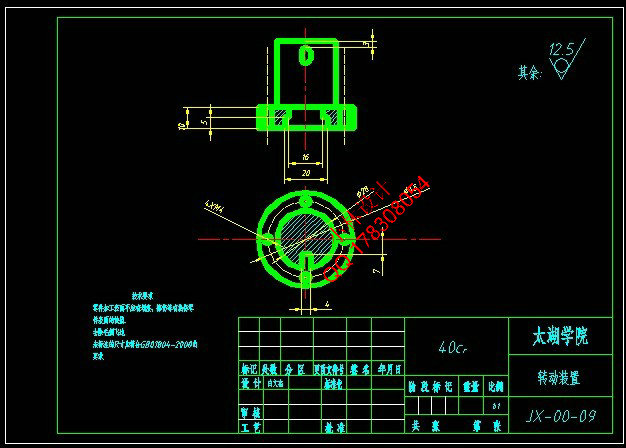
够代替人类完成危险、减轻人类劳动强度、重复枯燥的工作,提高劳动生产力。 臂、大臂和底座。明确合理的设计思路,确定了机械手工作原理并对然夹持器、气缸、步进电机、轴 承进行了校核计算并附带了简图并对零件的质量、重心、惯性主轴和惯性力矩进行辅助设计计算,可 以大大减轻在设计过程中繁琐计算及校核步骤。 关键字:机械手,气缸,校核。
Abstract process and simulate to the behave of hands with electrical integration. It can carry heavy objects and work in the harsh environment which is high temperature, poisonous ,full of dust, flammable and combustible monotonous and full of radioactive substance instead of people. Manipulator is a automatic device which is used in the automatic production process and it can carry and move things. It is a new device which is developed in the mechanization and automatic production process. In recent years , with the widely used of electronic technique especially the electronic computer. The research and production of robot has became a new technology which is developing rapidly in the high-tech industry . It promotes the development of manipulator. It makes the combination of the manipulator with mechanization and automation become easier . Manipulator can complete the dangerous and boring work instead of people. It can reduce
labour intensity of people and raise the labour productivity . freedom. It designs and draws the picture with Auto cad software ,it includes holder, a small arm, the big arm and the base. The clear and reasonable thinking determines the working principle of the manipulator . This also checks and calculates the holder, cylinder, stepper motor and bearing. Apart from this , it contains some pictures and design and measure the quality , barycentre principal axis of inertia and force of parts. It can greatly reduce the complicated calculation and check in the design process. Keywords: robot, cylinder, checking
目录 |
|
部分图纸 截图 |
    |
|
说明: |
如需了解本设计的具体详细信息请联系本站客服,说明看哪个设计(编号)哪个详细部分,我们将远程或截图给您观看. 机械毕业设计|论文 |

| [要求PR≥2,百度收录≥1000页;联系QQ:178308054] |
Powered by 小林机械资料商城 © 2013-2020 All Rights Reserved. 客服QQ:178308054
喜欢www.xiaolinbysj.com,请告诉你QQ上的5位好友,多谢您的支持! 皖ICP备2021006205号-1
