|
设计描述:
文档包括:
Word版说明书一份,共24页,约10000字
开题报告一份
CAD版本图纸,共5张:
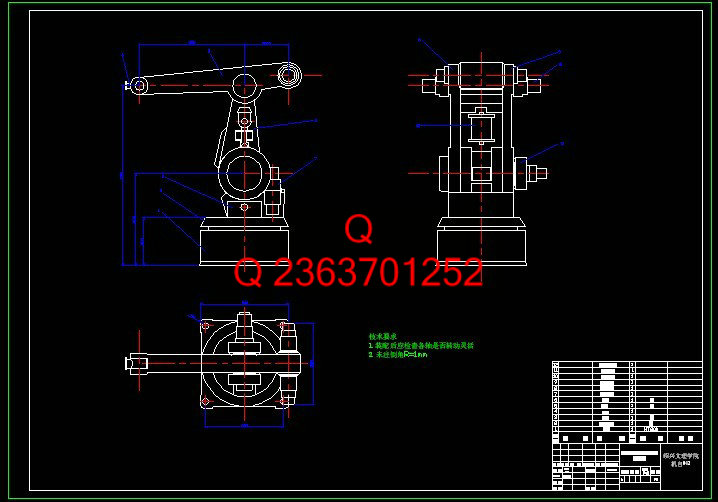
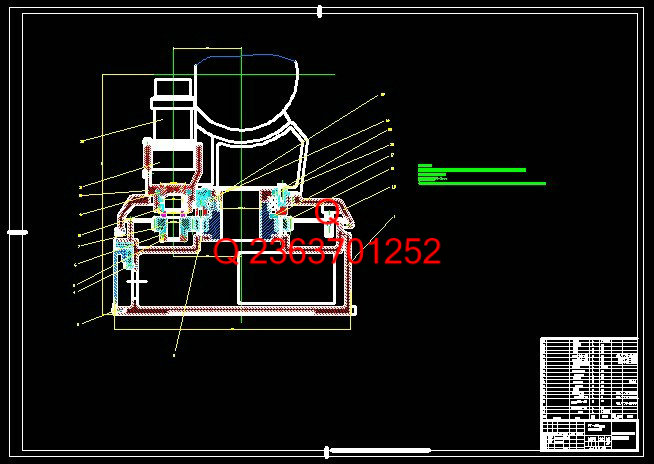
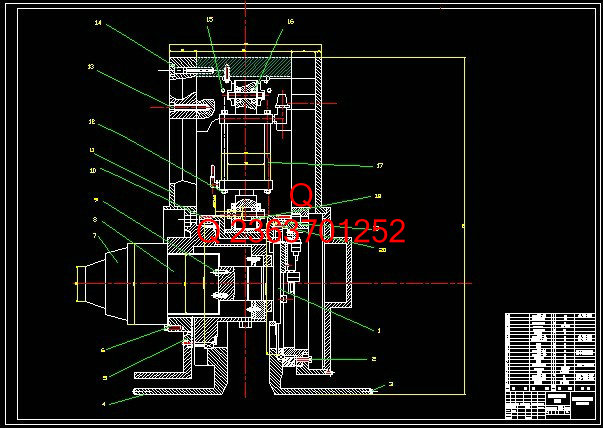
5自由度焊接机器人总体及大臂与腰部设计
摘要
据不完全统计,全世界在役的工业机器人中大约有将近一半的工业机器人用于各种形式的焊接加工领域,焊接机器人应用中最普遍的主要有两种方式,即点焊和电弧焊。我们所说的焊接机器人其实就是在焊接生产领域代替焊工从事焊接任务的工业机器人。这些焊接机器人中有的是为某种焊接方式专门设计的,而大多数的焊接机器人其实就是通用的工业机器人装上某种焊接工具而构成的。在多任务环境中,一台机器人甚至可以完成包括焊接在内的抓物、搬运、安装、焊接、卸料等多种任务,因此,从某种意义上来说,工业机器人的发展历史就是焊接机器人的发展历史。
众所周知,焊接加工一方面要求焊工要有熟练的操作技能、丰富的实践经验、稳定的焊接水平;另一方面,焊接又是一种劳动条件差、烟尘多、热辐射大、危险性高的工作。工业机器人的出现使人们自然而然首先想到用它代替人的手工焊接,减轻焊工的劳动强度,同时也可以保证焊接质量和提高焊接效率。
本次我所设计的机器人为五自由度弧焊机器人。本说明书对本次设计的主要考虑内容进行了叙述和讲解,包括机器人的总体设计以及传动系统的构成与设计,电动机的选择,圆锥齿轮的设计与校核,谐波减速器的原理以及选择,腕部转动轴的校核,齿形带规格的选择以及滚动轴承的选择与校核等。
由于设计经验不足以及理论知识的匮乏,本次设计肯定存在许多不足之处,望答辩老师谅解并不吝赐教。
关键词 焊接机器人;齿形带传动;谐波减速器;五自由度
design 5 degree-of-freedom welding robot overall and big arm and waist
ABSTRCT
According to incomplete statistics, nearly half of the world's industrial robots in service are used for welding. The most common application of welding robot are in two main ways, spot welding and arc welding. The welding robot we are talking about is actually industrial robots which are doing the work in the welding tasks instead of welding production welder. Some of this welding robot is specially designed for welding while most of them are actually a common industrial robot fitted with a welding tool. In multi-task environment, a robot can even complete many kinds of work including the grasp of welding, handling, installation, welding, unloading and other tasks,. Therefore, in a sense, the history of the development of industrial robots is the history of the development of welding robot.
It is well known that the welding processing on one hand requires on skilled operational skills, rich practical experience and stable level of welding; on the other hand, welding is a work with poor working conditions, dust, and heat radiation and high-risk. The emergence of industrial robots first makes people naturally think of using it to replace the manual welding to reduce labor intensity. But also it ensures the welding quality and enhances the efficiency of welding.
The robot I designed is a DOF arc welding robot. The design statement mainly include design of robot's drive system and the its composition, the choice of motor, design of bevel gear and verification, the principle of harmonic reducer and its choice, wrist Check the Department of rotational axis, the choice of rolling bearings and its checking and so on.
KEY WORDS welding robot; profile belt transmission; harmonic reducer; 5-DOF
目录
中文摘要 ……………………………………………………………………Ⅱ
英文摘要 ……………………………………………………………………Ⅲ
目录 …………………………………………………………………………Ⅳ
前言 ……………………………………………………………………………1
1 绪论 ……………………………………………………………………3
2 毕业设计基本思路 …………………………………………………………4
2.1总体所涉及思路及内容 ……………………………………………5
2.2设计传动方案 ………………………………………………………5
3 焊接机器人腰部与大部设计 ………………………………………………7
3.1 腰部结构设计 ………………………………………………………7
3.1.1 电动机的选择 …………………………………………………7
3.1.2 谐波减速器介绍及选择 ……………………………………8
3.1.3 轴的设计与校核 ……………………………………………10
3.1.4 轴承的设计计算与核 …………………………………………11
3.1.5 齿轮设计计算与校核 …………………………………………12
3.2 大臂结构设计 ………………………………………………………15
3.2.1 电动机的选择 …………………………………………………15
3.2.2 谐波减速器的选择 ……………………………………………15
3.2.3 轴的设计与校核 ………………………………………………16
4总 ……………………………………………………………………………18
参考文献 ………………………………………………………………………19
致谢 ……………………………………………………………………………20
前言
焊接机器人之所以能够占据整个工业机器人总量的40%以上,与焊接这个特殊的行业有关,焊接作为工业“裁缝”,是工业生产中非常重要的加工手段,同时由于焊接烟尘、弧光、金属飞溅的存在,焊接的工作环境又非常恶劣,焊接质量的好坏对产品质量起决定性的影响。归纳起来采用焊接机器人有下列主要意义:
(1)稳定和提高焊接质量,保证其均一性。焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定作用。采用机器人焊接时对于每条焊缝的焊接参数都是恒定的,焊缝质量受人的因素影响较小,降低了对工人操作技术的要求,因此焊接质量是稳定的。而人工焊接时,焊接速度、干伸长等都是变化的,因此很难做到质量的均一性。
(2)改善了工人的劳动条件。采用机器人焊接工人只是用来装卸工件,远离了焊接弧光、烟雾和飞溅等,对于点焊来说工人不再搬运笨重的手工焊钳,使工人从大强度的体力劳动中解脱出来。
(3)提高劳动生产率。机器人没有疲劳,一天可24小时连续生产,另外随着高速高效焊接技术的应用,使用机器人焊接,效率提高的更加明显。
(4)产品周期明确,容易控制产品产量。机器人的生产节拍是固定的,因此安排生产计划非常明确。
(5)可缩短产品改型换代的周期,减小相应的设备投资。可实现小批量产品的焊接自动化。机器人与专机的最大区别就是他可以通过修改程序以适应不同工件的生产。
我国开发工业机器人晚于美国和日本,起于20世纪70年代,早期是大学和科研院所的自发性的研究。到80年代中期,全国没有一台工业机器人问世。而在国外,工业机器人已经是个非常成熟的工业产品,在汽车行业得到了广泛的应用。鉴于当时的国内外形势,国家“七五”攻关计划将工业机器人的开发列入了计划,对工业机器人进行了攻关,特别是把应用作为考核的重要内容,这样就把机器人技术和用户紧密结合起来,使中国机器人在起步阶段就瞄准了实用化的方向。与此同时于1986年将发展机器人列入国家“863”高科技计划。在国家“863”计划实施五周年之际,邓小平同志提出了“发展高科技,实现产业化”的目标。在国内市场发展的推动下,以及对机器人技术研究的技术储备的基础上,863主题专家组及时对主攻方向进行了调整和延伸,将工业机器人及应用工程作为研究开发重点之一,提出了以应用带动关键技术和基础研究的发展方针,以后又列入国家“八五”和“九五”中。经过十几年的持续努力,在国家的组织和支持下,我国焊接机器人的研究在基础技术、控制技术、关键元器件等方面取得了重大进展,并已进入使用化阶段,形成了点焊、弧焊机器人系列产品,能够实现小批量生产。
我国焊接机器人的应用主要集中在汽车、摩托车、工程机械、铁路机车等几个主要行业。汽车是焊接机器人的最大用户,也是最早用户。早在70年代末,上海电焊机厂与上海电动工具研究所,合作研制的直角坐标机械手,成功地应用于上海牌轿车底盘的焊接。“一汽”是我国最早引进焊接机器人的企业,1984起先后从KUKA公司引进了3台点焊机器人,用于当时“红旗牌”轿车的车身焊接和“解放牌”车身顶盖的焊接。1986年成功将焊接机器人应用于前围总成的焊接,并于1988年开发了机器人车身总焊线 。
|