|
设计描述:
文档包括:
Word版设计说明书1份,共32页,约16000字
开题报告一份
外文翻译一份
CAD版本图纸,共5张
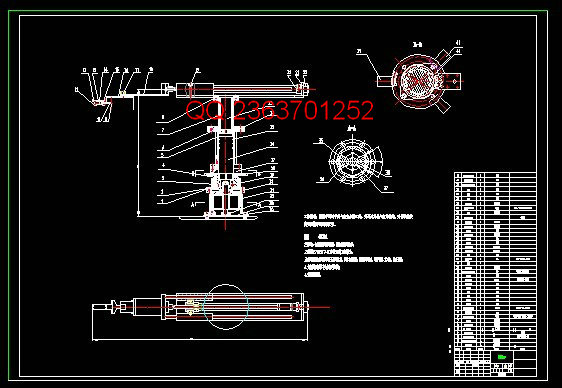
办公打印机整箱码垛机械手的设计
摘 要
工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,随着工业自动化发展的需要,机械手在工业应用中越来越重要。目前工业机械手主要承担着焊接、喷涂、搬运以及码垛等重复性并且劳动强度较大的工作。本文简要介绍了工业机器人的概念,机械手的组成和分类,气动技术的特点及国内外发展状况,本文主要对机械手进行了总体结构设计,确定了机械手的技术参数。同时,设计了机械手的手部结构、腕部结构及机械手的升降臂和回转臂结构,研究了机械手的气动系统。
关键词:工业机器人;机械手;码垛
Design of the Automatic Manipulator for Office printers palletizing
Abstract
Industrial robot technology and applications to some extent,reflect the extent of a country’s level of industrial automation,with the development needs of industrial automation,mechanical hand more and more important in industrial appliations.Current industrial robot is mainly responsible for the welding,coating,handling,and palletizing and other repetitive work and the labor intensity greatly.This paper briefly introduces the concept of industrial robots,composition and classification of the manipulator,the characteristics of peneumatic technology development status of home and abroad.This paper makes an overall design of mainpulator,determine the technical parameters of manipulator.Meanwhile,design and calculation of the manipulator lifting arm and rotating arm structure,design of manipulator han structure.Research of the pneumatic manipulator system.
Keywords: industrial robot;manipulator;palletizing
目 录
1 绪论 1
1.1 课题背景及研究意义 1
1.2 国内外相关研究情况 1
1.2.1 国内机器人研究情况 1
1.2.2 国外机器人研究情况 2
1.3 机械手的组成和分类 2
1.3.1 机械手的组成 2
1.3.2 机械手的分类 5
1.4 本课题研究的主要内容 6
1.5完成本课题的工作方案及进度计划 7
1.6毕业设计的工作量要求 7
2 机械手的设计方案 8
2.1 机械手的座标型式与自由度 8
2.2 机械手的手部结构方案设计 8
2.3 机械手的手腕结构方案设计 8
2.4 机械手的手臂结构方案设计 8
2.5 机械手基座部分设计 8
2.6 机械手的驱动方案设计 9
2.7 机械手的技术参数 9
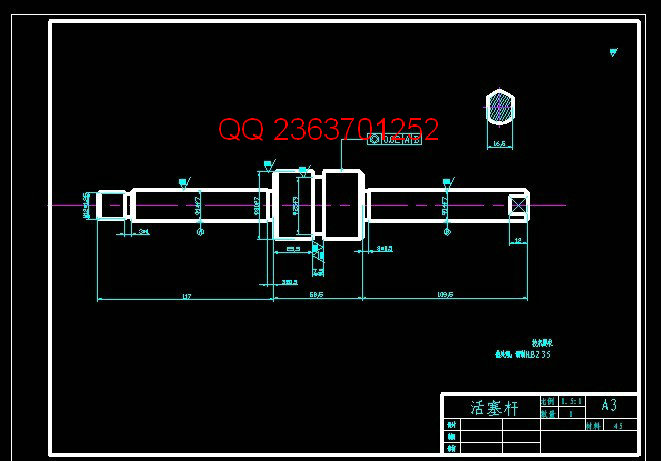
3 手部结构设计 10
3.1 夹持式手部 10
3.2 手部设计的基本要求 10
3.2.1 应具有适当的夹紧力和驱动力 10
3.2.2 手指应具有一定的开闭范围 10
3.2.3 应保证工件在手指内的夹持精度 10
3.2.4 要求结构紧凑、重量轻、效率高 10
3.2.5 应考虑通用性和特殊要求 11
3.3 手部驱动气缸的设计 11
4 手腕结构设计 14
4.1 手腕的自由度 14
4.2 手腕的驱动力矩的计算 14
4.2.1 腕部回转支承处的摩擦力据 14
4.2.2 手腕转动件和工件的偏重对转动轴线所产生的偏重力矩 14
4.2.3 克服启动惯性所需的力矩 15
4.2.4 回转缸的动片与缸径、定片、端盖等处密封装置的摩擦阻力矩 15
5 臂部结构设计 17
5.1 臂部设计的基本要求 17
5.1.1 臂部应承载能力大、刚度好、自重轻 17
5.1.2 臂部运动速度要高,惯性要小 17
5.1.3 手臂动作应该灵活 17
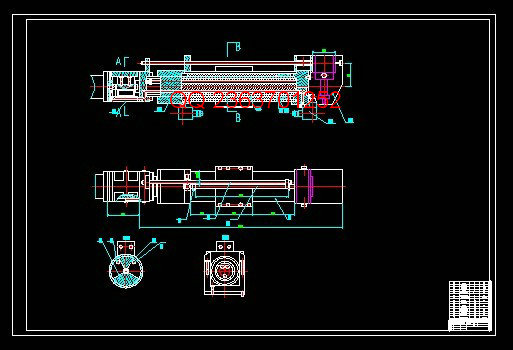
5.2 手臂伸缩与手腕回转部分 18
5.2.1 结构设计 18
5.2.2 导向装置 18
5.2.3 手臂伸缩驱动力的计算 19
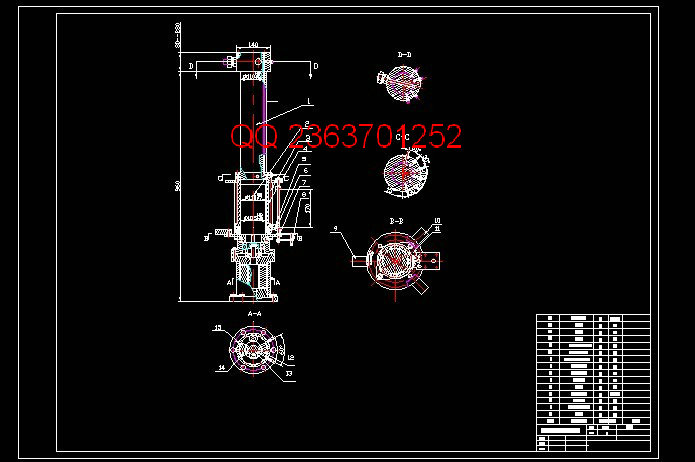
5.3 手臂升降和回转部分 19
5.3.1 结构设计 19
5.4 手臂伸缩、升降用液压缓冲器 20
5.5 手臂回转用液压缓冲器 20
6 基座结构设计 22
7 结论 23
参考文献 24
致谢 26
毕业设计(论文)知识产权声明 27
毕业设计(论文)独创性声明 28
|