|
设计描述:
文档包括:
设计word版本说明书一份,9000字
CAD版本图纸,共9张
设计说明书
目录
一、目录………………………………………………………………………………………………………2
二、前言………………………………………………………………………………………………………3
(一)机械手的用途说明…………………………………………………………………………3
(二)设计机械手的目的、意义………………………………………………………………3
(三)设计指导思想应达到的技术性能要求…………………………………………4
三、设计方案论证………………………………………………………………………………………5
(一)机械手的原始依据…………………………………………………………………………5
(二)机械手的运动方案论证…………………………………………………………………6
四、机械手各组成部件设计计算………………………………………………………………8
(一)抓取机械设计…………………………………………………………………………………8
(二)手腕机构…………………………………………………………………………………………12
(三)手臂设计…………………………………………………………………………………………14
(四)缓冲装置设计…………………………………………………………………………………22
(五)定位机构设计…………………………………………………………………………………25
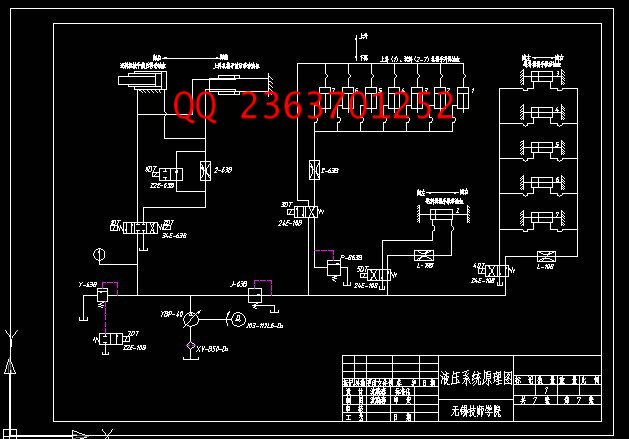
(六)机械手驱动系统设计……………………………………………………………………25
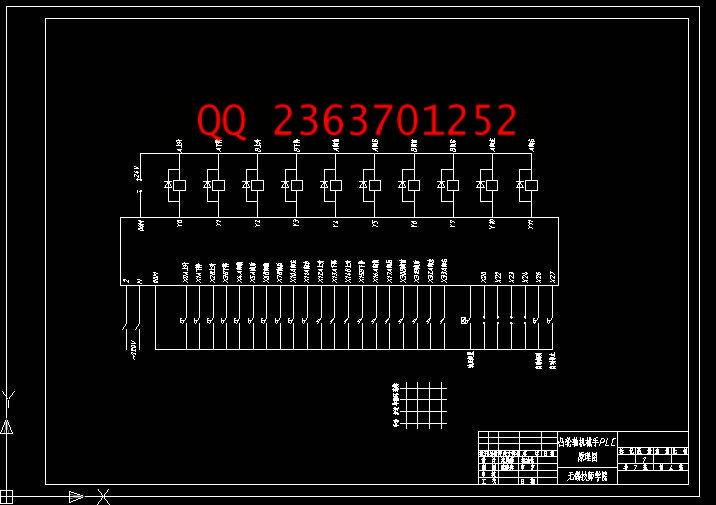
五、机械手控制系统设计…………………………………………………………………………25
六、设计总结……………………………………………………………………………………………26
七、参考文献……………………………………………………………………………………………27
二、 前言
(一)机械手的用途说明
机械手是模仿人手工作的机械设备。实验用机械手的设计,是指机械手臂在一定范围内的摆动,手臂的垂直方向的上下移动及手爪的伸缩运动组成。由启动系统实现各运动的驱动。它的主要作用是将工件按预定的程序自动地搬运到需要的位置,或者保持工具进行工作。机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。
(二)机械手的目的、意义
机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生产,尤其在恶劣的劳动条件下,它代替人作业的意义更加重大。因此,在机械加工中得到越来越广泛的应用。
目的是,我们对机械手的设计步骤有一定的平衡了解;也能基本掌握机械设计的方法;综合运用学过的理论知识;全面复习绘图技巧,并较好的运用于毕业设计绘图上。通过这次设计,使我了解到,自动控制的对象主要是单机或某个生产过程,智能控制则包括控制对象及整个工作环境或整个生产过程;自动控制的目标是使在系统控制的某个状态下,尽量消除环境对系统的影响,智能控制关心的使最终状态或现行状态是否合乎要求。因此,要充分考虑环境的影响;自动控制的学习来源重要是对象的状态的反馈,所以智能控制需要一个庞大的数据库;自动控制理论着重描述对象的数学模型,然后,通过各种控制算法进行控制,以达到目的,智能控制着重直接控制经验。
(三)设计的指导思想,应达到的技术性能要求
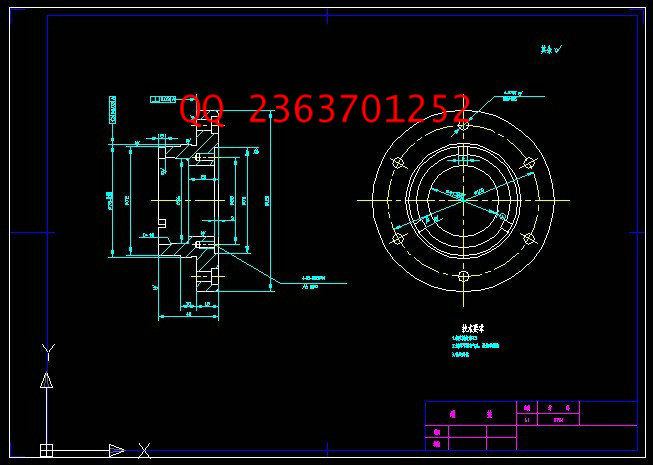
结构简单:设计为三自由度的机械手臂,运动形式简单,可以把手臂设计成为沿导向装置运动,直接选用标准规格的液压缸和内胀式机械手爪,无须另行设计。
外观不要有手臂堵塞外形:设计尽量要求安装方便,各非标准件加工方便。因此,不必设计成套形式,管道也不必安排在手臂内部,可以采用软管直接连接。
本次设计的手臂不要光用于工业生产,因此,对各部件的加工精度及安装要求不高,可以在通用机床上加工完成。
三、设计方案论证
(一)机械手设计的原始数据
1.组成结构
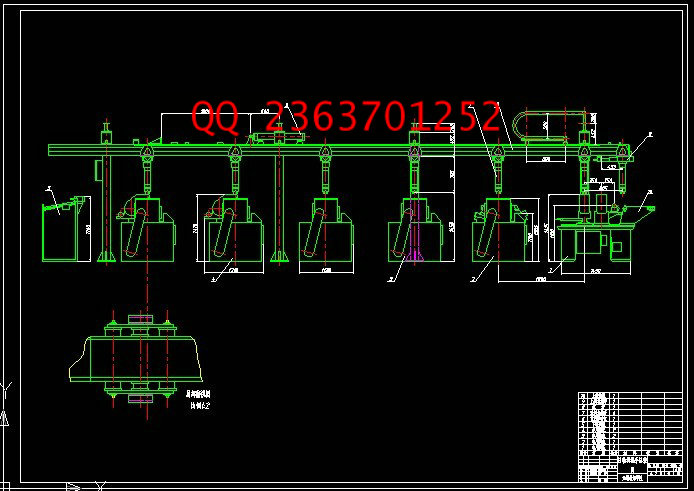
机械手主要由执行机构、驱动系统以及位置检测等装置组成。各系统的关系如图:
控制系统 → 驱动系统 → 执行系统 → 抓取工件
‖ —— 位置检测 —— ‖
2.执行机构
包括手臂、手腕、手部和立柱等部件,有的还增设行走机构。
(1) 手部:即与物体接触的部件,由物体接触的形式又可分为夹持式和吸附式手部。
(2) 手腕:是连接手腕和手臂的比肩,起改变工件的空间位置的作用。
(3) 手臂:支撑手腕和手臂的部件以改变工件的空间位置。
(4) 立柱:支撑手臂的部件,手臂的各部分运动均与立柱有密切的关系。
(5) 行走机构:为完成远距离的操作和扩大使用范围,可增设滚轮行走机构。
(6) 机座:它是机械手的基础部件,机械手执行机构的各部分和驱动系统均安装在机座上,起支撑和联结作用。
3.驱动机构
机械手臂的驱动系统是驱动执行机构运动的出动装置,常用的有液压传动、气压传动、电力传动和机械传动。
4.控制系统
有电力控制和射流控制两种,一般常见的为电力控制,这是机械手的重要组成部分,它支配着机械手按规定的程序运动,并记忆人们给予机械手的指令信息,同时按其控制系统的信息,对执行机构发出指令,必要时,对机械手的动作进行控制,当动作有错误时,发出警报信号。
5.位置检测装置
控制机械手执行机械的运动位置并随时将执行机构的实际位置反馈给控制系统,并与设定的位置比较,然后控制系统进行调整,从而使执行机构一定的精度达到预定位置。
(二)机械手的运动方案论证
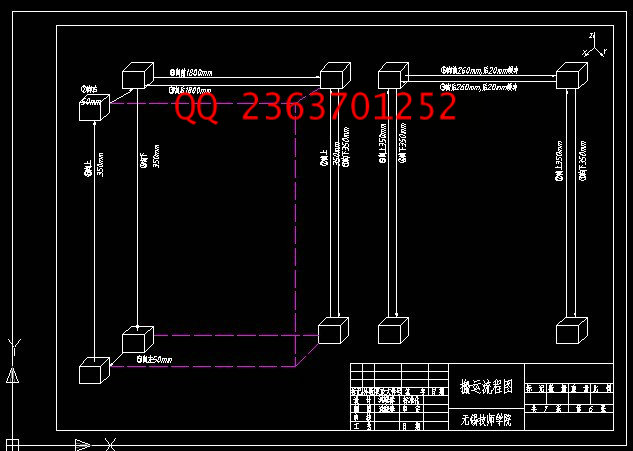
1.机械手的运动形式(坐标形式)确定
按机械手的运动坐标型可分:直角坐标系式机械手、圆柱坐标系式机械手、极坐标式机械手、关节式机械手。
直角坐标式机械手:臂部可以沿直角坐标轴X、Y、Z三个方向移动,亦臂部可以前后伸缩,左右移动,上下升降。采用此种坐标形工作范围小,占地空间大,定位精度好,应用较多,适用于空间布置或与自动线配合。
极坐标式机械手:手臂可以沿直角坐标轴的X方向运动,还可以绕Y轴和Z轴转动,亦手臂可前后伸缩,上下摆动,左右移动。采用此种坐标形式工作范围大,占地空间小,定位精度差,应用少。
关节式机械手:这种机械手的臂部可分为大臂和小臂,其中大臂和小臂的连接以及大臂和机体的连接均为关节式连接,亦小臂对大臂可绕肘部上下摆动一定角度,大臂可绕肩部摆动一定角度,手臂可以左右转动一定角度。采用此种坐标形式工作范围大,占地空间小,定位精度差,应用较小。
圆柱坐标戏式机械手:这种机械手的运动由两个直线运动和一个回转运动组合而成,手臂沿X、Z方向的移动,还有手臂的水平回转。此种机械手工作范围教大,灵活程度教高,占地面积小,结构比较简单,定位进度高,应用比较广泛,多为通用型。
因此本次设计我选用直角坐标系机械手。
|